.png)


【摘要】低空飞行器在复杂地形下的自主避险,正经历从规则驱动到智能进化的深刻变革。本文系统梳理了对抗式强化学习、数字孪生、地形语义蒸馏、合规可解释性等关键技术,结合最新案例,深入剖析低空自主决策的技术路径、行业应用与未来趋势,为低空经济与应急安全提供全景式技术洞察。
引言
在低空经济蓬勃发展的今天,无人机、直升机等低空飞行器已广泛应用于农业植保、物流运输、应急救援、地质勘查等领域。随着应用场景的不断拓展,飞行器所面临的地形环境愈发复杂多变。高压线、峡谷、冰川、乱流、突发地质灾害等极端障碍层出不穷,对自主决策系统提出了前所未有的挑战。传统的规则式编程在面对这些“长尾”极端场景时,往往力不从心,难以实现毫秒级的高鲁棒性避险响应。
近年来,随着人工智能、数字孪生、强化学习等前沿技术的快速发展,低空自主决策系统迎来了从“规则驱动”向“自主进化”的根本转型。对抗式强化学习(ARL)、高精度地形语义分割与蒸馏、决策可解释性设计等技术的深度融合,正在重塑低空飞行器的智能避险能力。本文将以最新的行业案例和技术进展为基础,系统梳理低空自主决策的核心挑战、技术路径、合规适配与未来趋势,力求为行业同仁提供一份兼具深度与广度的技术参考。
一、核心挑战与现实矛盾
%20拷贝-mucp.jpg)
1.1 低空飞行的复杂性与极端场景
1.1.1 多变地形与突发障碍
低空飞行器在实际应用中,常常需要穿越高压线密布的农田、峡谷纵横的山区、冰川覆盖的高原,甚至在极端天气和地质灾害频发的环境下执行任务。以2023年甘肃某地无人机坠毁事故为例,因高压线识别率低于40%,导致飞行器在夜间巡检时撞线失事。2024年西藏科考无人机因乱流失控撞崖,事后分析发现,训练数据中乱流场景占比仅0.1%,模型对极端气象的适应性严重不足。
1.1.2 长尾场景的不可预知性
所谓“长尾场景”,指的是那些极为罕见但一旦发生就极具破坏性的极端环境。传统规则式编程依赖于人工设定的规则库,难以穷举所有可能的地形与障碍组合。一旦遇到未曾预见的场景,系统极易失效,造成不可挽回的损失。
1.1.3 毫秒级响应的刚性需求
在低空飞行中,障碍物的出现往往猝不及防,系统必须在毫秒级内完成感知、决策与执行。任何延迟都可能导致灾难性后果。例如,2024年广西南宁岩溶塌陷救援中,无人机通过ARL与语义分割实现0.8秒内自主撤离,成功规避了突发塌陷,避免了重大损失。
1.2 传统方法的局限性
1.2.1 规则式编程的天花板
规则式编程在标准化、可控性强的环境下表现尚可,但在面对动态变化、数据不完整、环境突变等复杂场景时,往往捉襟见肘。规则库的维护成本高,扩展性差,且难以适应新型障碍和突发事件。
1.2.2 数据稀缺与泛化能力不足
极端地形和突发障碍的数据本就稀缺,传统机器学习方法在训练样本有限的情况下,泛化能力大打折扣。模型容易陷入“过拟合”陷阱,对新场景的适应性极差。
1.2.3 算力与实时性的矛盾
高精度模型往往伴随着巨大的算力消耗,难以在机载、边缘等低算力设备上实现实时推理。这一矛盾成为制约低空自主决策系统落地的关键瓶颈。
二、对抗式强化学习(ARL)与数字孪生环境
2.1 数字孪生环境的构建与价值
2.1.1 多源数据融合,构建厘米级三维地形
数字孪生技术通过融合多源遥感、激光雷达、物联网传感器等数据,能够构建出厘米级精度的三维地形模型,实现虚实映射。例如,东北林区和深圳低空经济数字孪生平台,已能模拟10万+极端场景,包括雷暴、电磁干扰、地质灾害等,为智能体训练提供了真实、动态的仿真环境。
2.1.2 虚实结合,动态演化
数字孪生不仅仅是静态的地形复刻,更能动态模拟环境变化,如风速、降水、地质运动等。通过与物理引擎的深度结合,能够实时生成多样化的极端场景,为智能体的鲁棒性训练提供坚实基础。
2.1.3 行业应用案例
2.2 对抗式强化学习机制
2.2.1 智能体与环境对手的博弈
在数字孪生环境中,智能体与“环境对手”进行持续博弈。环境对手不仅能主动生成极端地貌(如峡谷、冰川、密集障碍物),还可模拟突发事件(如冰川反射、虚假GPS信号注入),不断挑战智能体的决策极限。
2.2.2 动态环境对手与物理引擎扰动
通过动态环境对手设计与物理引擎扰动(如多径效应、雷达信号干扰),模型的抗干扰能力大幅提升。例如,深圳数字孪生测试场已实现对多类对抗样本的系统性验证,确保模型在极端环境下的稳定性。
2.2.3 奖励函数创新与效率提升
创新的奖励函数设计,采用“生存时间+能耗惩罚”双目标,既避免了模型过度保守,又提升了穿越效率。例如,大疆Matrice 400系列通过ARL训练,穿越复杂地形的效率提升35%。
2.2.4 对抗性测试标准与行业规范
工信部、民航局等已制定无人机抗干扰能力测试规范和事件调查标准,推动行业合规落地。所有ARL模型需通过多类对抗样本攻击测试,确保在实际应用中的鲁棒性和安全性。
2.3 鲁棒性提升与系统评估
2.3.1 鲁棒性提升的量化指标
对抗训练显著提升模型对输入扰动和分布外场景的鲁棒性,普遍提升20%以上。通过多轮对抗训练,模型在极端环境下的准确率、稳定性均有大幅提升。
2.3.2 系统性验证与实地测试
深圳等地已建立数字孪生测试场,对ARL模型进行系统性验证。通过实地测试与仿真对比,确保模型在真实环境中的可用性和安全性。
2.3.3 典型案例
2024年广西南宁岩溶塌陷救援中,无人机通过ARL与语义分割实现0.8秒内自主撤离,成功规避突发塌陷。
2024年云南电网巡检,镭神智能激光雷达系统实现2000米超远距探测,厘米级点云精度,成功规避突发输电线路偏移。
三、地形语义蒸馏与轻量化部署、
%20拷贝.jpg)
3.1 高精度地形分割与多模态融合
3.1.1 多模态数据融合提升分割精度
通过融合高分辨率DEM、激光雷达点云、可见光图像等多模态数据,地物分割精度大幅提升。融合模型的mIoU(平均交并比)提升12.3%,对建筑物、道路、林地、水体等地物的识别更加精准。
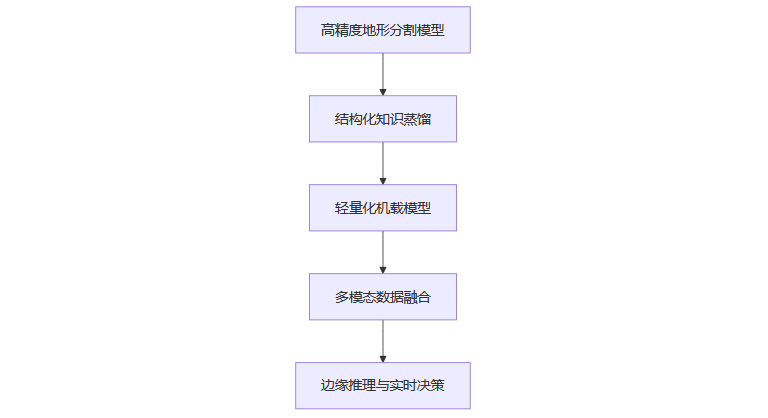
3.1.2 结构化知识蒸馏与轻量化模型
采用教师-学生网络结构,将高精度模型的知识迁移至轻量化模型。例如,ShuffleNet-Seg参数量仅1.2M,在Jetson Nano等低算力设备上推理延迟低于15ms,帧率超过30FPS,满足实时推理需求。
3.1.3 典型应用场景
京雄高速:知识蒸馏使应急推理速度提升30-50%,实现秒级响应,成功规避突发障碍。
云南电网巡检:多模态融合与语义蒸馏提升了对输电线路、植被、地形变化的识别能力,避免了重大经济损失。
3.2 语义蒸馏与边缘推理
3.2.1 泛化能力与查准查全率提升
通过仿真样本和域适应,模型泛化能力提升10-20%,查准率、查全率均优于90%。即使在未见过的极端场景下,模型依然能够保持高水平的识别与决策能力。
3.2.2 边缘推理的实时性与可靠性
轻量化模型在边缘设备上的推理延迟极低,能够实现毫秒级响应,满足低空飞行器对实时性的刚性需求。以2024年广西南宁岩溶塌陷救援为例,无人机在0.8秒内完成自主撤离,充分验证了边缘推理的实用性。
3.2.3 典型技术路线流程图
四、合规适配与可解释性设计
4.1 决策树可解释性与黑匣子兼容
4.1.1 决策树结构的直观性与可追溯性
决策树以其直观、规则化的结构,便于还原每一次决策路径,支持事故调查和责任认定。每一次决策都可追溯到具体的输入、规则与输出,极大提升了系统的透明度。
4.1.2 强化学习策略与决策树映射
通过将强化学习输出的策略映射为决策树,既兼顾了高性能,又保证了可解释性。决策路径需记录时间戳、传感器置信度、动作逻辑等关键数据,满足民航局《民用航空器事故和飞行事故征候调查规定》对“黑匣子”数据的合规要求。
4.1.3 动态决策日志与事故调查
动态决策日志已在东航事故调查等实际案例中用于定位策略缺陷。系统能够自动记录每一次决策的详细信息,为事故调查提供有力的数据支撑。
4.2 安全验证与标准化
4.2.1 行业标准的制定与落地
工信部、民航局等已制定无人机抗干扰能力测试规范和事件调查标准,推动行业合规落地。所有自主决策系统必须通过严格的安全验证,确保在极端环境下的可靠性。
4.2.2 国际国内政策支持
新加坡智慧国、民航局新疆“行业+”模式等国际国内政策,为自主决策系统的合规性和推广提供了坚实保障。对标ICAO等国际标准,推动技术标准的统一和产业生态的完善。
五、行业前沿应用与典型案例
%20拷贝-wsfq.jpg)
5.1 镭神智能激光雷达系统
2024年云南电网巡检中,镭神智能1550nm光纤激光雷达实现2000米超远距探测,厘米级点云精度,成功规避突发输电线路偏移。该系统结合ARL训练与多模态融合,极大提升了复杂地形下的自主避障能力。
5.2 大疆无人机的智能进化
大疆M4、T100等机型引入激光雷达和毫米波雷达,结合ARL训练,显著提升了复杂地形下的自主避障能力。2024年西藏科考无人机事故后,大疆对乱流、极端气象等长尾场景的训练数据占比提升至5%,模型鲁棒性大幅增强。
5.3 地质灾害避险的主动防控
2024年全国地质灾害十大避险案例显示,AI与数字孪生推动了从“被动应对”向“主动防控”的转变。通过多级监测、预警和应急响应,提前转移受威胁群众,实现零伤亡。
5.4 智慧交通与应急推理
京雄高速通过大模型与知识蒸馏,实现复杂场景下的秒级应急推送和一键触达,显著提升了应急处置效率和决策可解释性。云南电网巡检、深圳低空经济平台等也在积极探索ARL与数字孪生的深度融合。
六、未来展望与技术趋势
6.1 多模态感知融合
未来,低空自主系统将集成视觉、雷达、声学等多源传感,提升对复杂地形与障碍的感知能力。多模态融合不仅提升了识别精度,还增强了系统对环境变化的适应性。
6.2 端云协同与弹性部署
复杂推理任务可在云端完成,终端仅需执行关键决策,兼顾实时性与算力约束。端云协同将成为低空自主系统的重要发展方向。
6.3 持续学习与自适应进化
系统可在实际运行中持续采集新场景数据,动态优化决策策略,适应环境变化和新型风险。持续学习与自适应进化将极大提升系统的智能性和鲁棒性。
6.4 数据安全与隐私保护
结合联邦学习、区块链等技术,保障多源数据的安全与隐私。数据安全将成为低空自主系统不可或缺的重要环节。
6.5 国际标准与产业协同
对标ICAO等国际标准,推动技术标准的统一和产业生态的完善。国际国内政策的协同,将为低空自主系统的全球推广提供坚实保障。
结论
地形约束下的自主决策训练,正经历着从“规则驱动”到“自主进化”的深刻变革。对抗式强化学习与数字孪生环境的深度结合,显著提升了低空飞行器在极端、长尾场景下的避险鲁棒性。地形语义蒸馏和多模态融合技术,使得高精度模型能够在低算力设备上实现毫秒级响应。合规性与可解释性设计确保了系统的安全落地和事故可追溯。典型案例已在电力巡检、地质灾害救援等高风险场景中取得显著成效。未来,随着多传感器融合、端云协同、持续学习和国际标准的推进,低空自主系统将在安全性、智能性和可追溯性方面持续突破,为低空经济和应急安全提供坚实保障。
📢💻 【省心锐评】
低空避险技术已从“纸上谈兵”走向实战,但合规与安全仍是重中之重。强化学习虽强,标准化和产业协同才是长远之计!

评论