.png)


【摘要】本文系统梳理了基于激光雷达与边缘计算的无人机起降平台毫米级障碍物感知与避障系统的技术架构、核心能力、行业应用与未来趋势,深度剖析其在非结构化环境下的智能风险防控价值,并结合权威案例与数据,展望低空经济与智慧城市新机遇。
引言
在低空经济、智慧城市、应急救援等新兴领域,无人机的自主起降能力正成为行业关注的焦点。随着物流、巡检、农业、应急等场景对无人机智能化和安全性的要求不断提升,传统的视觉感知和单一传感器方案已难以满足复杂、动态、非结构化环境下的高精度避障需求。激光雷达(LiDAR)与边缘计算的深度融合,为无人机起降平台带来了毫米级障碍物识别与智能风险防控的全新解决方案。本文将以技术论坛深度文章的标准,全面梳理该系统的技术架构、核心能力、行业应用、性能指标与未来趋势,结合权威案例与数据,深入探讨其在无人机自主起降领域的创新价值与广阔前景。
一、系统组成与核心技术
%20拷贝.jpg)
1.1 多模态感知体系的构建
1.1.1 激光雷达的高精度三维感知
激光雷达(LiDAR)以其高空间分辨率、强穿透能力和毫米级测距精度,成为无人机起降平台环境感知的核心传感器。通过主动发射激光束并接收反射信号,激光雷达能够在复杂地形、遮挡、低光照等环境下,稳定获取平台周边的三维点云数据,实现对毫米级障碍物(如电线、钢丝绳、细小杂物等)的精准检测。部分高端型号点云密度可达120万点/秒,扫描频率高达10-20Hz,极大提升了障碍物识别的细腻度和实时性。
1.1.2 边缘计算单元的实时数据处理
边缘计算单元采用低功耗、高性能处理器(如ARM架构),部署轻量化AI算法(如PointPillars、CNN、RNN等),实现本地实时点云处理和环境建模。数据处理延迟可低至10ms,系统整体功耗低于15W,支持太阳能等绿色能源供电,适合长时间户外部署。边缘计算不仅大幅降低了数据传输延迟,还提升了系统的响应速度和可靠性,满足无人机起降对时效性的极致要求。
1.1.3 多传感器融合与AI算法优化
为进一步提升系统的鲁棒性和适应性,平台集成了视觉、毫米波雷达、超声波、红外等多种传感器,构建多模态感知体系。通过深度学习与自适应算法,系统能够融合多源数据,提升障碍物识别的准确性和环境适应能力。AI算法在边缘计算单元本地运行,实现障碍物的高精度识别、自主路径规划和动态避障。
1.2 系统架构与工作流程
无人机起降平台毫米级障碍物感知与避障系统的整体架构如下:
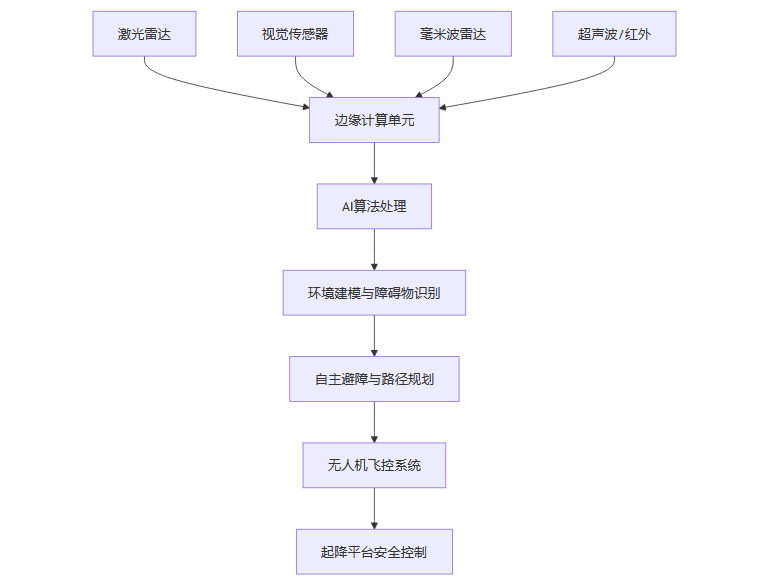
该架构实现了从多源感知、数据融合、AI处理到飞控执行的全流程闭环,保障无人机在复杂环境下的安全自主起降。
二、毫米级障碍物识别与动态追踪
2.1 高分辨率激光雷达的障碍物检测
高分辨率激光雷达通过高频扫描(10-20Hz,部分型号可达10000Hz),能够捕捉到毫米级静态和动态障碍物的细节信息。无论是平台周边的电线、钢丝绳,还是地面的细小杂物,系统都能实现精准检测。点云数据经过边缘AI算法处理后,障碍物的空间位置、尺寸、运动状态等信息被实时提取,为无人机起降提供可靠的安全保障。
2.2 动态障碍物的实时追踪与规避
系统不仅能够识别静态障碍物,还具备对动态障碍物(如鸟类、临时移动设备、行人等)的实时追踪能力。通过多传感器融合,系统可在雨雾、沙尘、低光照等恶劣环境下保持高鲁棒性。避障响应时间≤100ms,避障成功率比纯视觉方案提升40%以上。AI算法能够预测动态障碍物的运动轨迹,提前规划避障路径,极大降低起降过程中的碰撞风险。
2.3 多模态融合提升识别鲁棒性
在实际应用中,单一传感器往往难以应对复杂多变的环境。系统通过融合激光雷达、毫米波雷达、视觉等多源数据,显著提升了障碍物识别的鲁棒性。尤其在雨雾、沙尘、夜间等极端工况下,多模态融合方案能够有效弥补单一传感器的短板,保障无人机起降平台的全时段安全运行。
三、非结构化环境适应性与智能风险防控
%20拷贝.jpg)
3.1 非结构化环境的挑战
无人机起降平台常常部署在户外、临时搭建平台、复杂地形等非结构化环境中。这些环境具有高度的不确定性和动态变化特征,如风力干扰、突发障碍、地形起伏、光照变化等,给障碍物识别与避障带来了巨大挑战。
3.2 深度学习与自适应算法的应用
系统通过深度学习与自适应算法,能够针对环境的动态变化自动调整避障策略。AI模型在边缘计算单元本地运行,实时分析环境变化,动态优化障碍物识别与路径规划参数,实现障碍物提前预警和自主路径调整。即使在高风险场景下,系统也能保持高实时性与可靠性,极大降低起降风险和人为干预需求。
3.3 智能风险防控的实现路径
智能风险防控不仅依赖于高精度感知和AI算法,还需要完善的系统架构和安全机制。系统采用模块化设计,支持与地面站、AGV等设备无缝集成,并可通过OTA升级扩展功能,便于未来融入5G或卫星通信网络。加密协议(如TLS)和数据匿名化机制的集成,保障了数据安全与隐私,满足航空法规和GDPR等隐私规范要求。
四、系统安全、合规与可扩展性
4.1 国际标准与权威认证
系统严格遵循ISO 21384-3等国际无人机安全标准,并通过工信部等权威机构认证。无论是在国内还是国际市场,系统都具备良好的合规性和市场适应性。
4.2 数据安全与隐私保护
随着无人机应用规模的扩大,数据安全与隐私保护成为系统设计的重要考量。系统集成了加密协议和数据匿名化机制,确保数据在传输和存储过程中的安全性,满足航空法规和GDPR等隐私规范的要求。
4.3 模块化架构与功能扩展
系统采用模块化架构设计,支持与地面站、AGV等设备的无缝集成。通过OTA升级,系统可灵活扩展新功能,便于未来融入5G或卫星通信网络,实现更广泛的行业应用和生态集成。
五、性能量化与行业应用
%20拷贝.jpg)
5.1 性能指标一览
5.2 行业应用典型案例
5.2.1 电力巡检
国网重庆市南供电公司利用激光雷达无人机进行输电走廊三维巡检,系统能够穿透植被遮挡,实现毫米级测绘和障碍物智能识别。2025年迎峰度夏期间,故障率下降45%,极大提升了电网运维的安全性和效率。
5.2.2 高速公路巡检
福建高速公路无人机应用创新团队研发的机载边缘计算套件,实现空中实时识别道路抛洒物、交通拥堵等,提升应急处置效率。系统在复杂交通环境下表现出色,成为智慧交通的重要支撑技术。
5.2.3 物流与应急救援
2025年陕西山区洪灾救援中,物流无人机搭载激光雷达与边缘计算系统,在夜间复杂地形下实现零碰撞投送,救援效率提升60%。系统的高精度感知与智能避障能力,为应急救援提供了坚实保障。
5.2.4 城市起降平台
西安无人机在强风楼顶起降场景中,系统能够实时构建3D障碍物地图,识别5cm障碍物,避障成功率高达98%。为城市低空经济和智慧城市建设提供了安全可靠的技术支撑。
5.2.5 农业监测
无人机激光雷达用于作物三维监测、病虫害检测,结合边缘计算实现实时避障和路径优化。系统在农业生产中的应用,提升了作业效率和作物管理的智能化水平。
5.2.6 极氪9X光辉无人机母舰
极氪9X光辉无人机母舰搭载5颗激光雷达与边缘计算单元,点云速率高达120万点/秒,能够在施工路段精准识别3mm钢丝绳,起降事故率降低90%。该案例充分展示了系统在极端工况下的卓越性能。
六、技术发展趋势与未来展望
6.1 激光雷达与边缘计算的协同进化
激光雷达正朝着体积更小、重量更轻、功耗更低的方向发展,适应无人机平台的集成需求。边缘计算与AI算法的深度融合,推动无人机避障系统向更高智能化、自动化方向演进。
6.2 行业标准与政策推动
随着行业标准和政策的不断完善,智能感知与避障系统正逐步成为无人机起降平台的标配。各类法规对数据安全、隐私保护、系统可靠性提出了更高要求,推动行业整体安全水平的提升。
6.3 绿色设计与能源优化
系统采用绿色设计理念,支持太阳能辅助供电和动态功率管理,助力可持续部署。未来,随着能源技术的进步,系统将实现更长时间的自主运行,降低运维成本。
6.4 5G/卫星通信与生态集成
未来,系统将进一步强化5G/卫星通信能力,实现更广泛的行业应用和生态集成。无人机起降平台将成为低空经济、智慧城市、应急救援等领域的重要基础设施,推动行业迈向智能化、网络化、协同化的新阶段。
结论
基于激光雷达与边缘计算的无人机起降平台毫米级障碍物感知与避障系统,已成为非结构化环境下智能风险防控的核心技术。通过多传感器融合、AI算法优化、绿色低功耗设计和严格安全合规,系统显著提升了无人机在复杂环境下的自主起降安全性和行业应用广度。权威案例和数据充分证明了其在电力巡检、高速公路、物流救援、城市起降、农业监测等领域的卓越表现。未来,随着技术进步和标准完善,该系统将在低空经济、智慧城市、应急救援等领域发挥更大价值,助力无人机行业迈向更高水平的智能化与安全化。
📢💻 【省心锐评】
“这套系统如同给无人机装上‘显微级瞳孔’+‘闪电反射神经’,让非结构化环境风险从‘不可控’变为‘可计算’。”

评论