.png)
%20%E6%8B%B7%E8%B4%9D-kopf.jpg)

【摘要】SCas4D通过创新的分层级联优化策略,将动态3D场景训练速度提升20倍。它不仅保证了高视觉质量,还实现了精准的点跟踪与无监督的自动物体分割,为多个行业带来技术变革。
引言
动态3D场景的实时重建与渲染,始终是计算机图形学领域的一座高山。传统方法在追求高保真度的同时,往往需要付出巨大的计算代价,训练时间动辄以小时甚至天计。这种效率瓶颈严重制约了技术在虚拟现实(VR)、自动驾驶、影视制作等领域的规模化应用。开发者们长期面临一个两难选择,要么牺牲质量换取速度,要么忍受漫长的等待。
伊利诺伊大学厄巴纳-香槟分校的研究团队直面这一挑战,提出了名为SCas4D (Structured Cascade for 4D) 的全新框架。这项发表于《机器学习研究期刊》的工作,并非对现有方法的微小改良,而是一次思想范式的转变。它从现实世界物体运动的内在规律中汲取灵感,设计了一套“从粗到精”的结构化优化流程。
最终结果是惊人的。SCas4D仅用100次训练迭代,便达到了传统方法2000次迭代才能企及的视觉效果,实现了约20倍的训练加速。更重要的是,这种加速并未以牺牲质量为代价。相反,它在点跟踪精度等关键指标上实现了超越。本文将对SCas4D的技术架构、核心算法、实验性能及其产业影响进行一次系统性拆解。
❖ 一、技术哲学:源于现实的层次化运动洞察
%20拷贝-lvnc.jpg)
任何颠覆性的技术,其背后往往是对问题本质的深刻洞察。SCas4D的成功,根植于对物理世界运动规律的精准提炼。
1.1 运动的内在结构性
观察现实世界,物体的运动并非混沌无序。无论是人体做出一个动作,还是旗帜在风中飘动,其变形都遵循一种内在的层次化模式。
宏观带动微观。当你挥动手臂时,首先是肩关节驱动大臂进行大范围运动。随后,肘关节在此基础上驱动小臂。最后,腕关节和指关节完成更精细的调整。整个运动链条是一个典型的“从粗到精”的传递过程。
整体约束局部。一块布料的飘动,其整体轮廓的起伏决定了基本形态。布料上每一处的褶皱,都是在整体运动趋势下的局部表现。
传统方法往往忽略了这种结构性,它们试图平等地、同时地优化场景中的每一个点。这就像指挥一个交响乐团,却不设分部指挥,而是直接对每一位乐手下达独立的指令。其结果必然是效率低下,且难以协调出和谐的整体效果。
1.2 SCas4D的核心思想
SCas4D正是模仿了这种“从整体到局部”的指挥方式。它假设动态场景可以被分解为不同尺度的运动区域。通过首先求解大尺度区域的刚性运动,再逐步细化到小尺度区域的非刚性变形,最终微调每个点的具体位置,从而将一个复杂的高维优化问题,分解为一系列更简单、更低维的子问题。
这种思想的转变,是SCas4D实现性能飞跃的根本原因。它用结构化的先验知识,极大压缩了模型的搜索空间,使得优化过程能够更快地收敛到高质量的解。
❖ 二、核心架构解析:从3DGS到分层优化
SCas4D的整体架构建立在3D高斯喷绘 (3D Gaussian Splatting, 3DGS) 的基础之上。要理解SCas4D的创新,首先需要了解3DGS是什么,以及SCas4D如何对其进行“动态赋能”。
2.1 技术基石:3D高斯喷绘 (3DGS)
3DGS是近年来场景重建领域的一项明星技术。与需要复杂光线追踪的神经辐射场 (NeRF) 不同,3DGS采用了一种更直接、更显式的方式来表示三维场景。
它将场景表示为数以百万计的微小三维高斯椭球的集合。每个高斯体都包含以下属性:
位置 (Position):中心点坐标 (x, y, z)。
形状 (Covariance):一个3x3的协方差矩阵,决定了椭球的形状和朝向。
颜色 (Color):RGB颜色值。
透明度 (Opacity):Alpha值。
渲染时,这些高斯椭球被快速地“喷绘”到2D图像平面上,形成最终的画面。由于整个过程高度并行化,且无需复杂的神经网络推理,3DGS在保持高质量的同时,实现了极高的渲染速度。
然而,标准的3DGS是静态的。要让场景动起来,核心挑战在于如何高效、准确地计算出每一帧中,这数百万个高斯体的新位置和新形状。这正是SCas4D要解决的问题。
2.2 空间聚类:构建层次化“骨骼”
SCas4D的第一步,是为静态的3D高斯点云赋予结构。它通过空间聚类算法,将场景中的所有高斯点组织成一个三层的金字塔结构。
最精细层 (L2):使用K-means聚类算法,将所有高斯点根据其初始位置划分为1280个小区域。这一层构成了运动建模的基础单元。
中间层 (L1):在L2的基础上,使用层次聚类 (Agglomerative Clustering) 算法,将相邻的小区域进一步合并为320个中等区域。
最粗糙层 (L0):同理,将L1中的中等区域再次合并,形成64个大区域。
这个三层结构,就像为场景构建了一套“区域骨骼”。每个区域都可以被视为一个独立的运动单元,拥有自己的变换参数。
这种设计的好处是显而易见的。对于一个机器臂的运动,L0可能负责整个机械臂的整体平移和旋转,L1负责大臂和小臂的相对转动,而L2则负责处理更细微的表面振动或变形。
2.3 变形场建模:驱动场景运动的数学引擎
为每个区域构建了“骨骼”后,下一步是定义如何驱动这些骨骼运动。SCas4D为每个层次的每个区域都定义了一个随时间变化的变形函数。这个函数描述了该区域内所有点如何从初始状态(第0帧)变换到当前帧。
一个点的最终位置,是由它所属的L0、L1、L2三个层次的变换共同决定的。这种级联变换的设计,完美地体现了“从粗到精”的思想。
2.3.1 旋转表示:稳定可靠的四元数
在3D旋转的数学表示中,欧拉角虽然直观,但存在“万向锁”问题,容易导致数值不稳定。SCas4D明智地选择了四元数 (Quaternion) 来表示旋转。
四元数是一种四维复数,能够平滑、稳定地表示三维空间中的任意旋转,避免了奇异性问题。对于每一帧的每一个区域,模型都会预测一个四元数来描述其旋转状态。
2.3.2 平移与缩放
平移 (Translation):使用一个简单的三维向量
(tx, ty, tz)来表示。缩放 (Scaling):使用一个三维向量
(sx, sy, sz)表示。为了防止训练过程中出现过大或过小的缩放导致模型崩溃,研究人员使用了tanh激活函数将其值限制在一个合理的范围内。
2.3.3 物理感知:纠缠协方差矩阵
这是一个非常精巧的设计。在现实世界中,物体的形状变化(形变)往往与其运动状态相关。例如,一个快速移动的橡皮球会因为惯性而在运动方向上被拉长。
为了模拟这种效果,SCas4D引入了纠缠协方差 (Entangled Covariance) 的概念。它不再将高斯体的形状(协方差矩阵)视为一个独立的、随时间变化的参数。而是让高斯体的形状变化,与其所属区域的旋转变换直接关联。
具体来说,一个高斯体在t时刻的协方差矩阵 Σ_t,是由它在初始时刻的协方差矩阵 Σ_0 和其所属区域的旋转矩阵 R_t 计算得出的:
Σ_t = R_t * Σ_0 * R_t^T
这个公式的物理意义是,高斯椭球的朝向会随着其所在区域的旋转而同步旋转。这使得场景的变形看起来更加自然和符合物理直觉,同时也减少了需要优化的参数数量。
❖ 三、优化策略:级联式训练的艺术
%20拷贝-xtcz.jpg)
拥有了精巧的架构,还需要高效的训练策略来释放其潜力。SCas4D的核心竞争力,正是在于其独特的级联式多分辨率优化策略。
3.1 “从粗到精”的训练流程
传统方法试图一步到位,同时优化所有参数。SCas4D则将训练过程分解为多个有序的阶段,由粗到细,逐层深入。
这个流程可以用下面的Mermaid图清晰地表示:
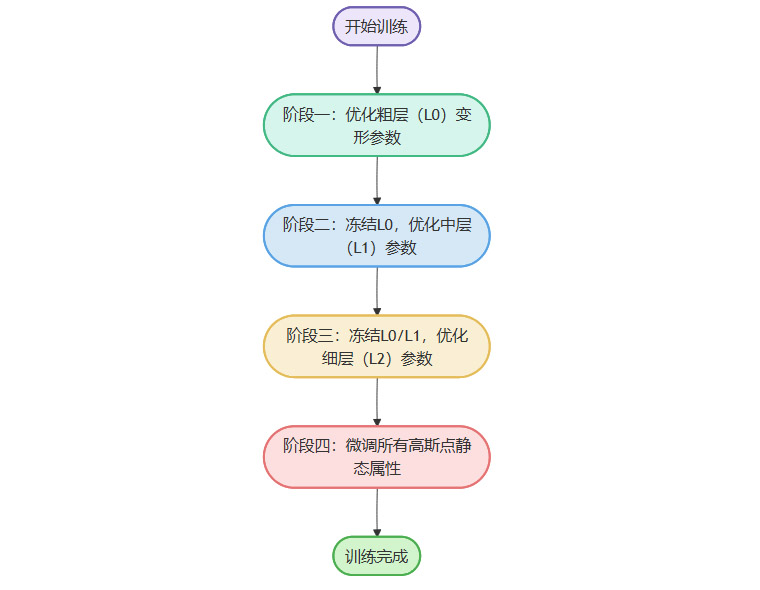
阶段一:系统集中精力学习场景的整体运动。此时只优化64个大区域(L0)的旋转、平移和缩放参数。这能快速捕捉到运动的主干。
阶段二:在L0参数基本固定的情况下,开始优化320个中等区域(L1)的参数。这一步是在整体运动的基础上,添加更丰富的部件级运动。
阶段三:继续向下,优化1280个小区域(L2)的参数,以刻画局部的非刚性变形。
阶段四:最后,对每个高斯点自身的静态属性(如初始颜色、透明度、初始形状)进行微调,以提升最终的渲染质量。
这种渐进式的训练方法,如同画家作画,先勾勒轮廓,再填充色块,最后精雕细节。每一步都在前一步的基础上进行,避免了在巨大的参数空间中盲目搜索,从而实现了极高的优化效率。
3.2 精心设计的损失函数
为了引导模型学习到既符合观测又物理合理的变形,SCas4D设计了一套复合损失函数。
这些正则化项如同“物理规则”的软约束,引导着优化过程朝向一个更加真实可信的解,有效提升了模型的泛化能力和最终效果的物理合理性。
3.3 性能飞跃的根源
总结来看,SCas4D实现20倍速度提升的根本原因有三点:
问题分解:将复杂的高维优化问题分解为多个低维子问题,降低了求解难度。
结构化先验:利用层次化结构作为先验知识,极大缩小了参数的搜索空间。
高效优化路径:级联式训练流程避免了大量无效的梯度计算和参数更新,让模型沿着最高效的路径收敛。
这三点共同作用,使得SCas4D能够在极短的训练时间内,达到甚至超越传统方法长时间优化的效果。
❖ 四、实验验证与性能评估
理论的优雅最终需要通过严格的实验来证明。研究团队在多个具有挑战性的数据集上,对SCas4D进行了全面的性能评估。
4.1 严苛的测试平台
FastParticle数据集 (合成):这是一个包含机器人、弹簧、轮子、钟摆、布料等6种高动态场景的合成数据集。为了增加难度,研究团队特意加快了物体的运动速度,对算法的鲁棒性和跟踪能力提出了极高要求。
Panoptic数据集 (真实):这是一个包含篮球、足球、网球等6种体育运动的真实多视角拍摄数据集。它考验算法在处理真实世界光照、遮挡和复杂人体运动时的表现。
4.2 多维度的评估指标
评估渲染质量,不能只看单一指标。团队采用了业界公认的三个核心指标:
PSNR (峰值信噪比):衡量重建图像与真实图像在像素级别上的差异,数值越高,质量越好。
SSIM (结构相似性):从亮度、对比度和结构三个方面评估图像的相似性,更符合人眼感知,数值越高,结构保持得越好。
LPIPS (感知图像块相似性):利用深度学习模型来衡量两张图像在感知层面的相似度,被认为是目前最接近人类主观感受的指标之一,数值越低,感官上越相似。
4.3 令人信服的性能对比
实验结果清晰地展示了SCas4D的压倒性优势。下表对比了SCas4D与当时最先进的动态3DGS方法 (Dynamic3DGS) 在相同训练迭代次数下的性能。
表格数据揭示了两个关键事实:
效率碾压:SCas4D仅用100次迭代,其各项指标就已经全面超越了Dynamic3DGS训练2000次的结果。这直观地印证了20倍的训练加速。
质量更优:如果给予SCas4D相同的2000次迭代,它的性能会进一步提升,显著优于对比方法。这说明其架构不仅快,而且上限更高。
此外,在关键点跟踪精度的测试中,研究团队手工标注了一些特征点来评估算法对运动细节的捕捉能力。结果显示,SCas4D的跟踪误差比传统方法平均降低了60%以上。这对于需要精确运动分析的应用(如体育科学、机器人控制)来说,是至关重要的优势。
❖ 五、意外之喜:无监督的自动物体分割
%20拷贝-bfqv.jpg)
在技术研发过程中,有时最激动人心的发现来自于意料之外。SCas4D的自动物体分割能力,就是这样一个“美丽的意外”。
5.1 分割能力的涌现机制
研究团队发现,当SCas4D模型学习完一个动态场景后,其内部学到的层次化运动参数,天然地蕴含了场景的物理结构信息。
运动一致性:属于同一个刚性部件的高斯点,在整个时间序列中,它们的运动模式(尤其是旋转)高度一致。例如,机器人的前臂上的所有点,都会跟随肘关节进行统一的旋转。
运动差异性:属于不同部件的点,其运动模式则存在显著差异。前臂和手掌的运动显然是不同的。
SCas4D的分层结构,本质上就是在学习和归纳这些运动模式。因此,模型训练完成后,每个最精细层(L2)区域的运动参数,就成了一种强大的特征描述符,可以直接用来区分不同的物理部件。
5.2 实现方法:简单而有效
实现自动分割的过程非常直接:
特征提取:对于场景中的每一个高斯点,提取它所属的L2区域在所有时间帧上的旋转四元数序列。这个序列构成了该点的运动特征向量。
聚类分析:使用经典的K-means聚类算法,对所有高斯点的运动特征向量进行聚类。
分割结果:聚类完成后,属于同一个簇的高斯点,就被认为是同一个物理部件。
整个过程完全无监督,不需要任何人工标注来告诉模型“这是一个手臂”或“那是一条腿”。系统通过观察运动本身,自主地发现了场景的结构。
5.3 效果展示与应用价值
实验结果表明,这种自动分割的效果出奇地好。
在机器人场景中,它能准确地分离出不同的连杆和关节。
在布料场景中,它能识别出运动模式不同的区域。
在多物体交互场景中,它能将不同的独立物体清晰地分割开来。
这项能力的应用价值巨大:
场景编辑:用户可以轻松地选中并单独操作场景中的某个物体或部件。
机器人视觉:帮助机器人理解物体的关节结构,从而更好地进行抓取和操控。
动作捕捉与分析:在体育或医疗领域,可以自动分离出人体的不同肢体部分,进行精细化的运动学分析。
SCas4D证明了,对动态过程的深度理解,自然会带来对静态结构的认知。这是一个非常深刻的启示。
❖ 六、产业影响与应用前景
一项技术最终的价值,体现在它能为现实世界带来多大的改变。SCas4D凭借其在速度和精度上的双重突破,为多个前沿行业打开了新的想象空间。
6.1 VR/AR与元宇宙内容创作
实时、高保真的3D内容是构建沉浸式体验的基石。SCas4D将极大地降低内容创作的门槛和周期。
实时环境扫描与重建:用户可以用手机或AR眼镜快速扫描一个动态场景(如宠物玩耍、朋友聚会),SCas4D可以在短时间内将其转化为高质量的4D数字资产,实现“所见即所得”的创作体验。
降低硬件门槛:由于训练效率大幅提升,原本需要高端工作站才能完成的建模任务,未来可能在消费级PC甚至云端服务上就能快速完成,让更多创作者能够参与到高质量3D内容的生产中。
6.2 影视动画与视觉特效
在工业级制作流程中,渲染时间是成本的主要构成部分。
缩短渲染周期:原本需要数天才能渲染预览的复杂动态特效,现在可能在数小时内完成。这使得导演和艺术家能够进行更多次的迭代和创意尝试,提升最终作品的艺术质量。
简化绑定与蒙皮:其自动分割和精确跟踪能力,可以辅助甚至部分替代传统流程中繁琐的角色绑定和权重绘制工作,极大提升动画师的工作效率。
6.3 自动驾驶与机器人
自动驾驶系统和智能机器人需要实时、准确地理解周围动态环境。
高频世界模型更新:SCas4D能够帮助自动驾驶系统更快地构建和更新周围环境的4D模型,包括车辆、行人、非刚性物体(如飘动的塑料袋)的精确运动状态。这对于预测其轨迹、做出安全决策至关重要。
提升仿真测试效率:可以利用真实路采数据,快速生成大量高保真的动态仿真场景,用于自动驾驶算法的闭环测试,极大加速算法的迭代和验证过程。
灵巧操作:对于机器人而言,理解物体的可变形部分(如电缆、布料)是实现灵巧操作的关键。SCas4D的分割和跟踪能力,为机器人与柔性物体交互提供了强大的感知基础。
6.4 医疗影像与体育科学
动态器官建模:可以利用CT或MRI序列,高效重建心脏跳动、肺部呼吸等器官的4D动态模型,为手术规划、疾病诊断和疗效评估提供前所未有的可视化工具。
高精度动作分析:教练和运动员可以利用多视角视频,快速生成运动员的精确4D运动模型,量化分析技术动作的每一个细节,远超传统2D视频分析的维度和精度。
❖ 七、局限性与未来展望
%20拷贝-bzdf.jpg)
尽管SCas4D取得了巨大成功,但它并非终点。作为一项开创性的工作,它也揭示了未来值得探索的方向。
7.1 当前面临的挑战
极端变形与拓扑变化:当前的层次化模型,对于爆炸、液体飞溅、烟雾等拓扑结构发生剧烈变化的场景,建模能力有限。这些场景的运动模式难以用固定的层次结构来描述。
初始聚类依赖:K-means聚类的结果对初始点的选择较为敏感,一次不够理想的初始聚类可能会影响最终的优化效果。
迈向真·实时:虽然训练速度提升了20倍,但距离“边拍边用”的真·实时训练和渲染,尤其是在边缘设备上,仍有距离。这需要算法与硬件的协同优化。
7.2 未来发展方向
与物理引擎结合:将SCas4D的表示能力与物理仿真引擎相结合,可以处理更复杂的物理现象,甚至让场景具备可交互和可预测的能力。
自适应结构:研究能够根据场景内容和运动复杂度,自动调整层次结构和区域数量的自适应模型,摆脱对固定聚类数量的依赖。
语义感知:将语义分割等高层视觉信息融入模型,让系统不仅知道“哪里在动”,更知道“是什么在动”,从而实现更智能的场景理解和编辑。
生成式4D建模:在当前重建能力的基础上,发展能够根据文本或草图提示,直接生成全新动态4D场景的生成式模型,这将是内容创作领域的终极目标。
结论
SCas4D的出现,不仅仅是一次算法效率的提升,它更代表了一种解决复杂问题的新思路。通过将现实世界的物理直觉(层次化运动)巧妙地转化为数学模型和优化策略,它成功地在效率和质量之间取得了前所未有的平衡。其核心贡献在于,它证明了结构化的、从粗到精的优化范式,是解锁高效动态场景建模的关键钥匙。
这项工作为4D内容创作、数字孪生、智能系统等领域铺设了一条更宽阔的道路。它所带来的20倍速度提升,以及无监督分割等附加能力,将催化一系列下游应用的创新。虽然前路仍有挑战,但SCas4D无疑已经在3D/4D建模的演进历史上,立下了一座重要的里程碑。
📢💻 【省心锐评】
SCas4D的核心是“分而治之”,用结构化思维破解了动态渲染的效率魔咒。它不仅让渲染更快,更让机器学会了像人一样,从整体到局部地理解运动,这比单纯的速度提升意义更为深远。

评论