.png)
%20%E6%8B%B7%E8%B4%9D-sxjk.jpg)

【摘要】当城市上空的飞行器从数百架次激增至数万架次,我们面临的已非单纯的个体安全问题,而是一个高度复杂系统的“脆性”挑战。看似稳定的空中网络,可能因微小扰动触发多米诺骨牌式的级联失效。本文将深入剖析这一系统性风险的内在机理,并系统阐述如何通过韧性工程的设计哲学,构建一个能够“优雅降级”而非灾难性崩溃的未来低空交通体系。
引言
城市空中交通(Urban Air Mobility, UAM)正从科幻构想迅速演变为工程现实。物流无人机、载人飞行器等新兴业态的崛起,预示着城市核心区的天空将成为继地面、地下之后的第三交通空间。流量预测显示,在不久的将来,单一城市的日均飞行架次将从目前的数百量级,跃升至数万甚至数十万的规模。这一数量级的剧变,迫使我们必须重新审视“安全”的定义。
传统的航空安全聚焦于单体可靠性,即确保每一架飞行器自身的发动机、飞控、结构等部件万无一失。这种思路在飞行器数量稀疏、航线隔离清晰的传统民航领域行之有效。但在高密度、高动态、高交互的UAM网络中,这种线性叠加的安全观已然失效。一万架“安全”的飞行器,并不能简单地构成一个“安全”的交通网络。
恰恰相反,一个由海量智能体组成的复杂系统,天然内含一种“脆性”(Brittleness)。它在常规工况下表现出极高的协同效率与稳定性,但其内部组件间的高度耦合与紧密依赖,也使其对微小扰动异常敏感。一旦某个扰动超出系统的弹性阈值,整个网络可能不会平滑地性能下降,而是会像玻璃一样瞬间崩塌。本文旨在深入探讨这种系统性风险的根源,并提出面向未来的解决方案——系统韧性工程(System Resilience Engineering)。
💠 一、从单体安全到系统安全:认知范式的根本跃迁
%20拷贝-icoj.jpg)
低空交通网络的构建,本质上是在物理空间之上叠加一个数字孪生系统。飞行器、地面站、通信链路、调度算法共同构成了一个复杂的社会-技术系统(Socio-Technical System)。在这个系统中,风险的形态发生了根本性变化。
1.1 简单叠加的幻觉:为何10,000个安全个体 ≠ 1个安全系统
复杂系统科学告诉我们,系统的整体行为并非其组成部分行为的简单总和。当大量智能体在高密度环境中交互时,会“涌现”(Emerge)出个体层面无法预测的宏观现象。
非线性效应:在低空网络中,一个微小的输入变化(如一个飞行器轻微偏航)可能不会导致线性的、可预测的输出,而是可能被协同算法放大,引发剧烈的、非比例的系统状态变化。例如,为了躲避这个偏航个体,周围数十架飞行器可能同时进行机动,瞬间形成一个局部的、意料之外的拥堵点。
紧耦合特性:为了实现高效协同,飞行器之间、飞行器与地面系统之间通过高速数据链紧密耦合。一架飞行器的航迹规划依赖于邻近飞行器的实时状态,而邻近飞行器的决策又反过来受其影响。这种“一动全身”的特性,是效率的源泉,也是风险传播的温床。
因此,安全关注点必须从“飞行器会不会掉下来”这个经典问题,扩展到“整个网络会不会瘫痪”这个系统性问题。这是一个从还原论到整体论的认知跃迁。
1.2 技术语境下的“脆性”:稳定表象下的崩溃临界点
在工程领域,“脆性”与“韧性”(Resilience)或“鲁棒性”(Robustness)相对。一个鲁棒的系统在遭遇扰动时,性能会下降,但核心功能依然维持。而一个脆性的系统,则表现为在某个临界点之前完美运行,一旦越过该点,则会发生灾难性的、不可恢复的失效。
我们可以用一个简单的比喻来理解。一个金属板在受力时会先发生形变,给予我们明确的预警信号,这是鲁棒性。而一块钢化玻璃,在达到其应力极限前看起来完美无瑕,但一旦超过极限,便会瞬间粉碎,这是脆性。高密度低空交通网络,若设计不当,就极易呈现出这种玻璃般的脆性特征。
1.3 新型风险图谱:从物理失效到系统性崩溃
为了更清晰地理解这一范式转变,我们可以将传统航空风险与未来低空网络风险进行对比。
这张表格清晰地揭示了,我们面对的是一个全新的战场。过去依赖硬件冗余和流程规范的“堡垒式”防御策略,在应对灵活多变、无孔不入的系统性风险时,将显得力不从心。
💠 二、“涌现”的群体性风险:级联失效的动力学解析
级联失效(Cascading Failure)是复杂网络中最具破坏性的现象之一,也是低空交通网络脆性的直接体现。它描述了一个局部、微小的故障,如何通过网络节点间的相互依赖关系,像推倒多米诺骨牌一样,最终演变成全局性的系统崩溃。
2.1 级联失效的微观解剖
级联失效的发生机理,本质上是一个负载重分配与节点过载的连锁反应过程。我们可以将其分解为以下几个步骤:
初始扰动:网络中一个或少数几个节点(如一架飞行器、一个地面通信基站)因故失效。
负载重分配:该失效节点原本承担的“负载”(如交通流量、通信数据、计算任务)并未消失,而是根据网络协议和算法,被重新分配给其邻近的、仍在正常工作的节点。
邻近节点过载:如果邻近节点的设计容量不足以吸收这部分突增的负载,它们也会因过载而失效。例如,一条空中走廊因突发状况关闭,涌入备用走廊的飞行器流量超出了其安全容量。
连锁反应与崩溃:过载失效的节点会触发新一轮的负载重分配,将压力进一步传导至更外围的节点。如此循环往复,故障规模呈指数级扩大,直至整个网络的核心功能瘫痪。
下面是一个简化的级联失效过程示意图。
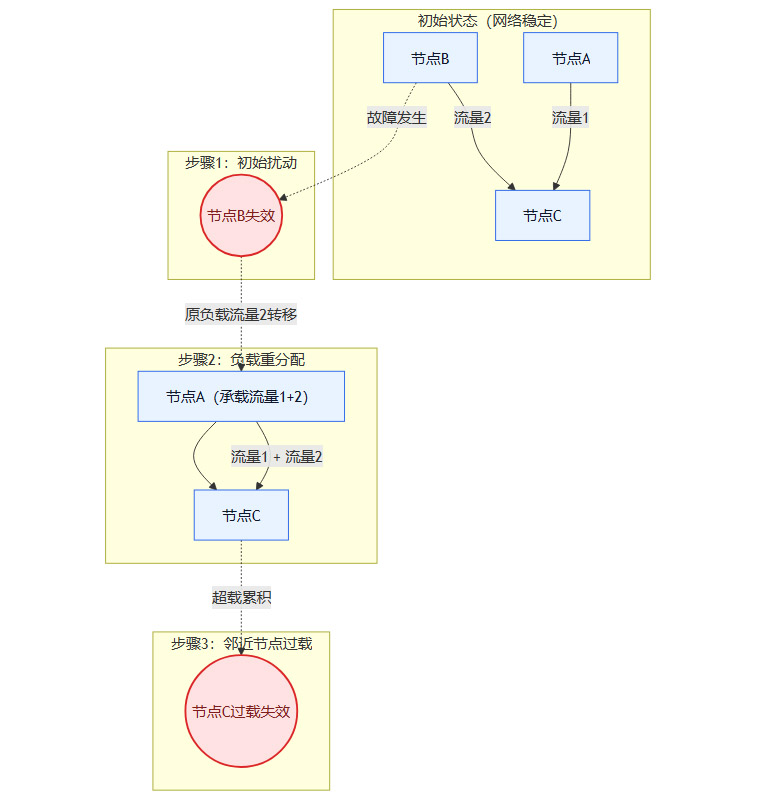
这个模型虽然简单,却揭示了级联失效的核心动力学。在高密度低空网络中,任何一个环节的脆弱性都可能成为那第一张倒下的骨牌。
2.2 低空网络中的关键触发因子
在低空交通网络中,能够触发级联失效的初始扰动多种多样,可以大致归为三类。
2.2.1 物理节点与链路的失效
这是最直观的触发源。
飞行器个体故障:单个飞行器因动力、飞控或传感器系统故障,突然在空中悬停、偏离航线或紧急迫降。这会立即对其所在航路造成物理阻塞,迫使后续飞行器重新规划路径,将流量压力转移到相邻航路。
地面基础设施故障:一个关键的5G基站或卫星导航增强站宕机,会导致该区域内的飞行器通信中断或定位精度下降。飞行器为恢复稳定通信,可能会集体飞向信号更好的区域,从而引发局部空域的瞬时拥堵。
恶劣天气:小范围的强对流天气(如雷暴、强风切变)会使部分空域临时不可用,所有计划通过该区域的飞行器必须绕飞,这同样是一种典型的负载重分配场景。
2.2.2 通信网络的拥塞与延迟
数字世界的“堵车”同样致命。
带宽饱和:在某个热点区域(如大型活动现场上空),大量飞行器同时进行高频次的数据交互(如高清视频回传、协同避障计算),可能导致局部通信带宽饱和。
延迟尖峰(Latency Spike):网络延迟的突然增加,会使得飞行器的状态信息更新不及时。协同避障算法如果基于过时的数据进行决策,可能会做出错误的判断,引发不必要的紧急机动,这种机动行为会像冲击波一样在机群中传播。
2.2.3 协同算法的内在缺陷
算法本身也可能成为风险源。
算法共振:如果网络中大多数飞行器采用相同的、未经充分多样性设计的避障算法,在某些特定场景下,它们可能会做出完全相同的、同步的规避动作。这种“算法共振”可能导致飞行器集群从有序状态瞬间变为混乱,甚至发生群体性近失。
决策死锁:在复杂的交叉口或汇合点,两组或多组飞行器可能陷入“你等我,我等你”的算法决策死锁,导致空中交通流中断。
2.3 建模与仿真:洞察“看不见”的风险
由于级联失效的复杂性和非线性,单纯依靠逻辑推演和事后分析是远远不够的。我们需要借助先进的建模与仿真工具,在系统上线前就对其进行“数字预演”。
基于智能体的建模(Agent-Based Modeling, ABM):将每一个飞行器、地面站都建模为一个具有自主决策能力的“智能体”,在虚拟的城市环境中模拟它们的交互行为。通过ABM,我们可以观察在注入不同类型的初始扰动后,系统是否会涌现出级联失效现象。
网络理论与图论分析:将低空交通网络抽象为一个由节点(飞行器、航路点)和边(航线、通信链路)组成的图。运用网络科学的理论,可以分析网络的拓扑结构,识别出那些对网络连通性至关重要的“关键节点”和“脆弱链路”,从而进行针对性的加固。
通过这些仿真手段,我们能够量化评估网络在不同压力下的“断裂点”,为韧性设计提供数据支撑。
💠 三、“信息污染”与决策黑洞:数字孪生世界的幽灵
%20拷贝-uelq.jpg)
如果说物理层面的级联失效是“明枪”,那么信息层面的污染则是更难防范的“暗箭”。在高密度网络中,飞行器并非完全依赖自身的物理传感器感知世界,其决策更多地依赖于一个共享的、由数据链构建的“数字现实”。这个数字现实的纯净度,直接决定了整个系统的安全。
3.1 “信息污染”的本质与传播机制
信息污染(Information Pollution)指的是错误、虚假或恶意的数据,通过可信信道在网络中被广泛传播,并被接收节点当作真实信息用于决策的过程。其可怕之处在于,它利用了系统内部的信任机制。
其传播机制类似于病毒:
污染源产生:一个节点(如一个传感器、一个数据服务)产生或被注入了错误数据。
可信信道传播:错误数据通过加密的、被认为是安全的数据链(如V2V, V2I通信)广播给邻近节点。
信任与接收:接收节点由于信任数据来源,未经充分交叉验证就将该数据纳入自身的“世界模型”。
决策扭曲与二次传播:基于被污染的世界模型,节点做出错误决策。同时,它又会将自己被污染的状态信息继续向外广播,成为新的污染传播源。
这个过程一旦启动,就会在网络中呈指数级扩散,短时间内扭曲大量飞行器的“认知”。
3.2 信息污染的典型来源
信息污染的源头多种多样,既可能源于无意的故障,也可能来自恶意的攻击。
3.2.1 传感器与感知的错误
传感器故障:机载的激光雷达(LiDAR)或摄像头因硬件问题,可能产生“鬼影”或错误的障碍物识别结果。例如,将地面一个反光的广告牌错误识别为空中的不明飞行物。
GPS欺骗(Spoofing):恶意方通过发射伪造的GPS信号,可以欺骗区域内的所有飞行器,使其相信自己处于一个错误的位置。这可能导致它们集体偏离预定航线,闯入禁飞区或危险区域。
3.2.2 外部数据源的错误
错误的气象数据:一个错误的天气预报服务,向系统发布了虚假的雷暴预警。这会导致大量飞行器同时执行不必要的规避机动,凭空制造出交通拥堵。
过时的地理信息:系统使用的数字地图未及时更新,一栋新建的超高层建筑没有被标注。所有依赖该地图进行航路规划的飞行器,都将面临碰撞风险。
3.2.3 恶意的网络攻击
数据注入攻击:攻击者通过破解通信协议或攻陷某个地面节点,直接向网络中注入精心构造的虚假信息,如伪造的飞行器状态、虚假的禁飞区指令等。这是最具破坏性的一种信息污染形式。
3.3 “决策黑洞”现象的形成
当信息污染在网络中大规模扩散后,一个极其危险的现象可能出现——“决策黑洞”。
它指的是大量飞行器因接收到相同的错误信息,而几乎在同一时间做出相同的、趋同的错误决策,从而在物理空间中形成一个危险的“奇点”。
我们可以用一个场景来描述这个过程:
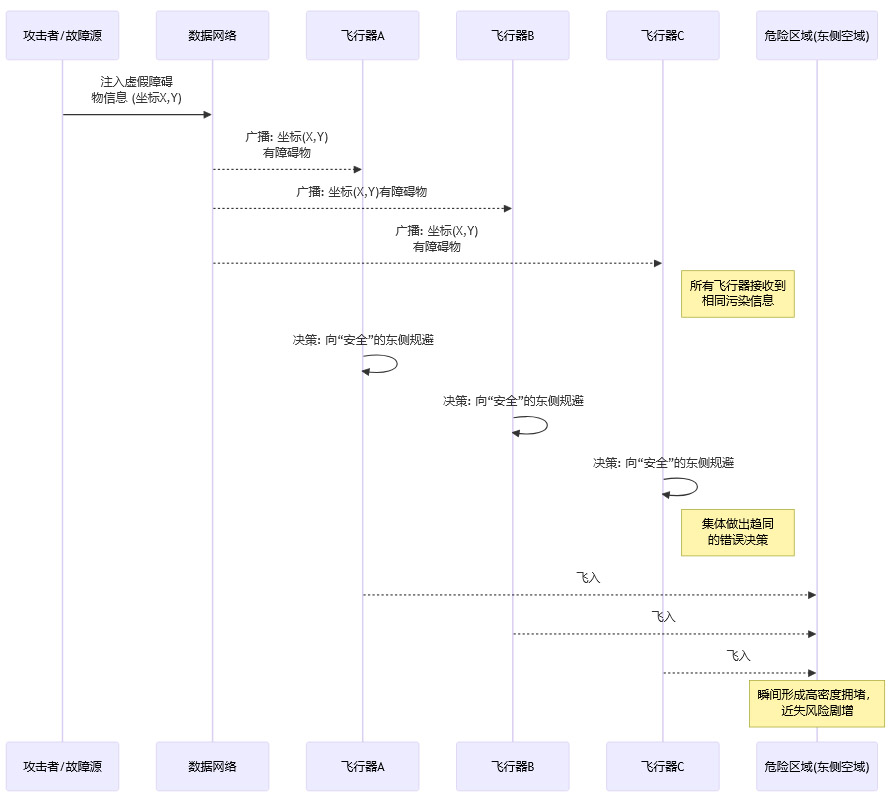
在这个场景中,东侧的“安全”空域因为所有飞行器的同步涌入,瞬间变成了一个密度极高、碰撞风险极大的“决策黑洞”。这个黑洞并非由物理障碍物造成,而是完全由错误信息凭空制造出来的。这充分暴露了高度依赖数据协同的系统,在面对信息污染时的内在脆弱性。
💠 四、韧性工程与“优雅降级”:构建有弹性的天空
%20拷贝-vqfi.jpg)
面对低空交通网络固有的脆性,传统的、以“预防所有故障”为目标的“Fail-Safe”设计哲学已显不足。我们必须转向一种新的范式——韧性工程(Resilience Engineering)。其核心思想是承认故障的必然性,将设计重点从“防止系统失效”转移到“确保系统在失效发生时,依然能够维持核心功能并从中恢复”。
4.1 理念之变:从“防碎”到“碎得优雅”
韧性工程追求的目标是“优雅降级”(Graceful Degradation)。这个概念源于容错计算领域,指的是系统在遭遇部分组件失效时,不会发生灾难性的整体崩溃,而是能够有控制地、渐进地降低其性能或功能,同时死守住最核心的安全底线。
Fail-Safe(故障安全):传统思路。例如,当飞行控制器侦测到严重故障时,可能会选择切断动力,让飞行器通过降落伞坠落。这是为了防止更坏的情况(如失控乱飞),但系统本身已经完全失效。
Graceful Degradation(优雅降级):韧性思路。例如,当一个飞行器的某个电机失效时,飞控系统能够立即重新分配其余电机的推力,虽然飞行性能(如速度、机动性)下降,但依然能保持稳定姿态,并自主飞行至最近的备降点。系统虽然“受伤”,但核心的安全飞行功能得以维持。
对于整个交通网络而言,优雅降级意味着在遭遇局部拥堵、通信中断或节点失效时,系统能够自动隔离故障区域、动态重组网络拓扑、降低部分区域的通行效率,但绝不会允许发生大面积的交通瘫痪或安全间隔失控。这是一种从追求完美运行到接受并管理不完美的转变。
4.2 核心策略一:去中心化决策与分布式协同
中心化的“上帝视角”管控模式,是系统性风险的天然放大器。一旦中央服务器宕机或被攻击,整个网络将群龙无首,陷入瘫痪。去中心化(Decentralization)是构建韧性系统的基石。
4.2.1 架构对比:中心化 vs. 去中心化
在去中心化架构下,每个飞行器都是一个智能体,它根据从邻近飞行器和地面设施获取的局部信息,自主进行航迹规划和避障决策。全局的交通秩序,是通过大量局部协商和协同行为“涌现”出来的,而非由一个中央大脑强制规定。这种架构天然地免疫了单点故障风险。
4.2.2 实现机制
多智能体系统(Multi-Agent Systems, MAS):将空域管理问题建模为大量智能体之间的协作与博弈。
分布式共识算法:在需要进行关键协同决策时(如进入繁忙交叉口),局部集群可以通过简化的共识协议(如Raft或Paxos的变种)快速达成一致,避免冲突。
分层决策模型:结合中心化与去中心化的优点。宏观的航路规划和流量控制由一个区域性的“大脑”负责,而微观的、实时的避障和间隔保持则完全下放给飞行器自主完成。这在效率和韧性之间取得了平衡。
4.3 核心策略二:混沌工程——在实验室里引爆“风暴”
如果我们等到系统在真实世界中崩溃后才去寻找原因,代价将是无法承受的。混沌工程(Chaos Engineering)是一种前瞻性的、实验性的系统韧性验证方法。它不是被动地等待故障,而是主动地、有控制地向生产系统(或高仿真的预生产环境)中注入故障,以检验系统在真实逆境下的行为。
混沌工程的理念是,通过不断用小规模、可控的“风暴”来锤炼系统,我们才能建立起对系统在遭遇真实大风暴时表现的信心。
4.3.1 混沌工程的实施流程
混沌工程遵循一套严谨的科学实验流程。
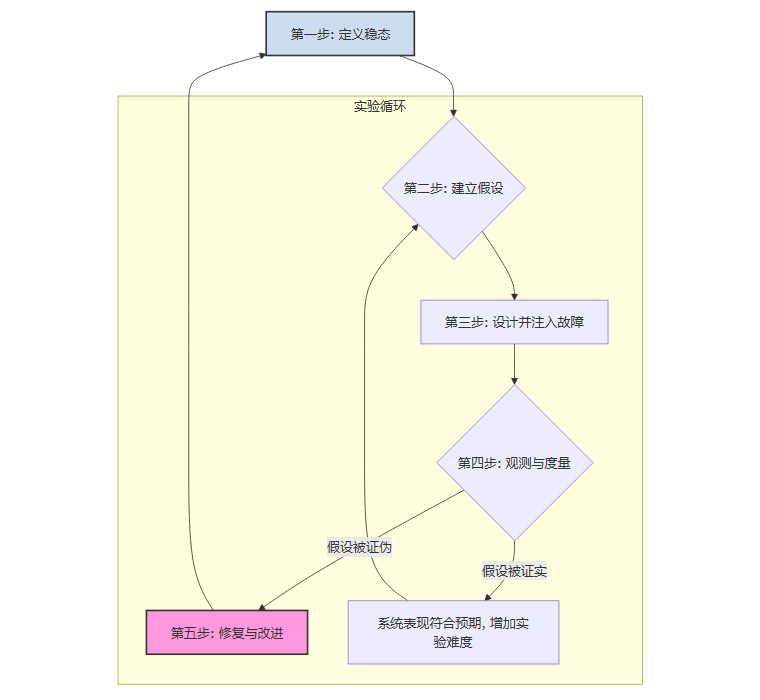
定义稳态:首先要明确系统“健康”时的关键指标是什么。例如,区域平均飞行间隔、通信延迟、航路冲突率等。
建立假设:提出一个关于系统韧性的假设。例如,“即使一个5G基站失效,受影响区域内飞行器的平均通信延迟也应在200ms以下,且不会发生安全间隔冲突。”
设计并注入故障:在系统中模拟真实的故障场景。这必须是可控的,影响范围(Blast Radius)要被严格限制。
观测与度量:在故障注入期间,密切监控第一步中定义的稳态指标,看其是否偏离正常范围。
修复或验证:如果系统表现未达预期(假设被证伪),说明发现了一个脆弱点,需要立即修复。如果系统表现符合预期,则可以增加故障的强度或广度,进行更严苛的测试。
4.3.2 在低空交通网络中的应用实例
网络延迟注入:随机在某些飞行器之间的数据链路上增加100ms的延迟,观察协同避障算法是否会因此产生误判。
GPS信号降级:在一个特定的地理围栏内,模拟GPS信号受到干扰,定位精度从米级下降到十米级,检验飞行器是否能切换到备用定位系统(如视觉定位、UWB)并保持安全飞行。
节点移除:随机让网络中的1%的飞行器“掉线”,模拟其通信模块失效,测试周边飞行器和地面系统能否在规定时间内感知到这一变化,并成功将其从协同网络中隔离。
数据污染注入:向系统中注入一个虚假的、移动的障碍物数据,观察系统的“信息免疫系统”能否识别并过滤掉这个污染数据,避免发生“决策黑洞”。
通过混沌工程,我们可以将那些隐藏在复杂系统深处的、“意想不到”的脆弱点,在系统上线前就暴露出来并加以修复。
4.4 核心策略三:AI自愈算法——系统的免疫系统
一个真正有韧性的系统,应该像一个生命体,具备自我感知、自我诊断和自我修复的能力。AI自愈(AI-powered Self-Healing)算法,正是扮演着这个“系统免疫系统”的角色。
实时异常检测(Anomaly Detection):利用机器学习模型(如LSTM、Transformer)持续分析整个网络的遥测数据流(包括飞行轨迹、通信负载、传感器读数等),实时识别出与正常模式不符的微小异常。这些异常可能是级联失效或信息污染的早期预警信号。
智能故障诊断与根因分析(Root Cause Analysis):当检测到异常后,AI系统能快速关联多个数据源,自动推断出最可能的故障根源。例如,当多个飞行器同时报告GPS定位漂移时,系统能迅速定位到是某个区域的GPS信号增强服务出现了问题,而不是飞行器自身的硬件故障。
动态资源调度与网络重构:一旦故障被定位,自愈系统会触发一系列自动化预案。
故障隔离(Fault Isolation):立即将故障节点(如一架行为异常的飞行器、一个发布错误数据的地面站)在逻辑上从网络中“隔离”,阻止其负面影响继续扩散。
自主航路重规划(Autonomous Rerouting):AI调度大脑会实时计算出新的全局最优交通流方案,为受影响的飞行器集群重新规划航线,绕开故障区域。
网络拓扑自适应:在通信链路中断时,飞行器可以自动切换通信模式,例如从依赖地面基站的蜂窝网络,切换到飞行器之间自组网的Mesh网络,确保关键信息的持续传递。
通过AI自愈算法,系统从一个被动接受运维指令的“机器”,进化成一个能够主动适应环境变化、修复自身损伤的“有机体”。
结论
天空的“脆性”,是高密度低空交通网络与生俱来的属性,源于其深度耦合的复杂性。试图通过消除所有单点故障来追求绝对安全的传统路径,在这片全新的天空下已然走不通。我们必须完成一次深刻的思维转变,从迷信单体可靠性,转向拥抱系统韧性。
级联失效的幽灵和信息污染的迷雾,警示我们必须正视那些“涌现”出的、难以预测的群体性风险。而韧性工程,正是我们应对这些挑战的系统性方法论。通过构建去中心化的决策架构来分散风险,运用混沌工程来主动“排雷”,并赋予系统AI自愈的能力,我们才有可能打造出一个能够“优雅降级”的低空交通网络。
未来的天空,安全与否,将不再仅仅取决于飞行器的发动机有多可靠,更取决于整个网络的架构有多“柔软”,算法有多“智慧”。这不仅是一场技术的革命,更是一场工程哲学的进化。
📢💻 【省心锐评】
未来天空的安全,不在于飞行器有多硬,而在于整个网络有多“软”。面对必然的失效,优雅降级是唯一的出路,这考验的是架构师的智慧而非工程师的蛮力。

评论