.png)
【摘要】Redwood AI模型的发布,标志着家用机器人从“机械执行者”向“智能协作者”进化。1X以轻量化、端到端自主操作、全身协同控制等技术突破,推动NEO机器人实现全场景家务、柔性交互与户外能力,开启家庭机器人规模化落地新纪元。
引言:家用机器人智能的“天花板”被重新定义
在人工智能与机器人技术飞速发展的今天,家用机器人正经历着一场前所未有的智能革命。过去,家庭机器人多被视为“机械执行者”,只能完成预设的、单一的任务,难以真正融入人类生活的复杂场景。然而,随着1X公司重磅发布Redwood AI模型,并将其应用于NEO机器人,这一局面正在被彻底改写。Redwood不仅为NEO装上了“类人大脑”,更以端到端的视觉-语言-动作融合、全身协同控制、极致轻量化等多项技术突破,推动家用机器人从功能工具向智能伙伴跃迁。本文将深度剖析Redwood AI模型的技术创新、NEO机器人的场景变革,以及其对整个行业的深远影响,带你洞见家用机器人“类人化”新纪元的来临。
一、Redwood AI模型:家用机器人智能进化的引擎
%20拷贝.jpg)
1.1 Redwood AI模型的技术底色
Redwood AI模型的诞生,是1X公司多年深耕家庭机器人领域的结晶。与动辄数十亿参数的大模型不同,Redwood以1.6亿参数的轻量化设计,专为家庭场景量身打造。其核心是视觉-语言-动作(VLA)端到端融合架构,能够让机器人像人一样“看、听、动”,实现对家庭环境的动态理解与自主决策。
1.1.1 Redwood的VLA融合架构
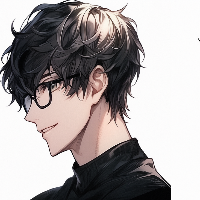
Redwood的VLA模型将视觉感知、语言理解与动作控制三大模块深度耦合,打破了传统机器人“感知-决策-执行”各自为政的壁垒。其工作流程如下:
这种闭环架构,使NEO能够在复杂家庭环境中,实时感知变化、理解人类意图、动态调整行为,实现“观察-决策-执行-反馈”的完整智能链路。
1.1.2 轻量化设计的极致追求
Redwood仅1.6亿参数,远低于主流大模型,却能在消费级GPU上高效运行。其秘诀在于:
针对家庭场景的高效特征提取网络
动态剪枝与量化技术,压缩冗余参数
端到端训练,减少中间环节的信息损耗
这种“小而美”的设计,不仅降低了硬件门槛,还让NEO能在无网络环境下独立工作,极大提升了实用性与数据安全性。
1.2 端到端自主操作:从“指令执行”到“场景理解”
Redwood的最大突破之一,是让NEO摆脱了对预设指令库的依赖,具备了端到端的自主操作能力。其核心在于:
基于EVE和NEO平台积累的海量真实家庭操作数据训练
强化学习与模仿学习相结合,提升泛化能力
“尝试-失败-重试”机制,实现从经验中自我优化
1.2.1 泛化能力的跃升
在实际应用中,NEO能够:
识别并理解从未见过的物体
根据环境变化自主调整操作策略
在失败后快速修正动作,提升成功率
例如,当NEO发现洗衣机门未关时,会主动弯腰关门;遇到新型水杯时,能通过多次尝试找到最佳抓取方式。实测数据显示,Redwood模型下NEO的操作成功率较传统模型提升40%。
1.2.2 场景适应性的提升
Redwood通过端到端的训练,让NEO能够快速适应家庭环境中的复杂变量,如:
家具摆放的动态变化
不同家庭成员的指令风格
多任务并发处理
这种能力,使NEO从“被动执行者”进化为“主动协作者”,真正融入家庭生活的每一个细节。
1.3 全身协同控制:机械仿生学的突破
Redwood是首批实现运动与操控联合控制的VLA模型,彻底打破了传统机器人“行走与操作分离”的技术瓶颈。其全身协同控制能力,主要体现在以下几个方面:
1.3.1 30+自由度的高精度协调
NEO搭载Redwood后,能够同步协调全身30多个自由度的关节,实现高度仿生的人体运动。例如:
开门时用左手扶墙保持平衡
弯腰捡物时膝盖弯曲角度精准匹配物体高度
行走中双手端托盘,动态调整重心
1.3.2 运动稳定性与速度的飞跃
Redwood优化了运动控制算法,使NEO的行走速度提升至6km/h,支持户外奔跑等动态场景。运动稳定性较前代提升65%,即使在复杂地形下也能保持平衡,极大拓展了应用场景。
1.3.3 机械仿生学的深度复刻
Redwood不仅关注动作的准确性,更强调运动的自然性与流畅性。NEO的动作不再僵硬机械,而是充满“人味”:
行走时手臂自然摆动
操作时身体微调以适应空间
与人互动时能做出点头、手势等肢体语言
这种仿生学的深度复刻,让NEO更容易被家庭成员接受,提升了人机共处的舒适度。
1.4 轻量化智能:本地运行的“小而美”奇迹
Redwood的轻量化设计,彻底颠覆了行业对大模型算力依赖的传统认知。其本地运行能力带来了多重优势:
1.4.1 高效本地推理
Redwood在NEO内置的消费级GPU上即可高效运行,无需依赖云端算力。其动态优化算法将运算延迟控制在50ms以内,确保实时响应。例如:
从接收“递一杯水”的语音命令到完成操作,全流程仅需2.3秒
复杂家务任务的多步操作,均可在本地自主规划与执行
1.4.2 数据隐私与安全的保障
本地运行意味着用户数据无需上传云端,极大降低了隐私泄露风险。即使在地下室、户外等网络盲区,NEO也能稳定工作,保障了家庭场景下的连续性与安全性。
1.4.3 降本提效的行业示范
Redwood的轻量化设计,为行业提供了“降本提效”的新范式。中小厂商无需高昂的硬件投入,也能开发出高性能的家用机器人,推动了整个行业的普及与规模化落地。
二、NEO机器人:家庭场景的智能革命
%20拷贝.jpg)
2.1 全场景家务覆盖:重构家庭劳动分工
Redwood赋予NEO前所未有的家务处理能力,实现了对家庭各类场景的全覆盖。其主要表现如下:
2.1.1 厨房场景的精细操作
NEO能够精准抓取玻璃杯、打鸡蛋等易碎物品,支持洗碗、擦灶台等多步骤操作。其动作柔和、力度可控,极大降低了物品损坏风险。
2.1.2 清洁场景的自主规划
在清洁任务中,NEO可自主规划扫地路径,弯腰清理沙发底灰尘,甚至能操作洗衣机完成衣物分类洗涤。其多任务并发能力,使家务效率大幅提升。
2.1.3 储物场景的智能整理
NEO通过视觉识别自动整理书架、叠放衣物,支持单手/双手模式智能切换。无论是整理儿童玩具,还是归置厨房杂物,都能游刃有余。
2.1.4 家务任务完成率与效率
实测数据显示,NEO能完成87%的日常家务任务,平均任务完成效率达人类的85%。这意味着,NEO不仅能“解放双手”,更能成为家庭劳动分工的重要一员。
2.2 安全柔性交互:人机共处体验的重塑
家庭环境对机器人的安全性与交互体验提出了极高要求。Redwood通过多项创新,重新定义了人机共处的标准。
2.2.1 实时碰撞检测与力控算法
NEO集成了高精度碰撞检测与力控算法,在触碰到人体或家具时,会立即调整力度至安全阈值(接触力<5N),有效避免了传统机器人的刚性碰撞风险。
2.2.2 柔性驱动与类人触感
NEO采用柔性驱动系统,机身外部包裹织物材料,手部采用仿生硅胶,带来“类人触感”。即使与儿童、宠物互动,也能确保安全与舒适。
2.2.3 多模态自然交互
NEO的语音交互模块融合了自然语言处理技术,能够理解复杂指令(如“把客厅的蓝色外套拿到阳台晾干”),并通过肢体语言(点头、手势)实现多模态沟通。其交互体验接近真人助手,极大提升了家庭成员的接受度。
2.2.4 情感与温度的注入
Redwood不仅关注功能实现,更注重情感体验。NEO能根据语气、表情调整回应方式,展现出“有温度”的家庭伙伴形象,打破了人机之间的冷漠隔阂。
2.3 户外能力拓展:从室内到室外的智能延伸
Redwood的运动控制优化,使NEO成为首批具备户外自主行动能力的家用机器人,极大拓展了应用边界。
2.3.1 复杂地形的适应性
NEO能够在草坪、台阶等复杂地形稳定行走,支持12km/h的奔跑速度,满足陪伴晨跑、户外搬运等多样化需求。
2.3.2 露营与户外场景的多功能协作
在露营等户外场景,NEO可协助搭建帐篷、递送装备,甚至在无网络环境下完成路径规划。其本地智能让服务场景从室内延伸至整个生活空间。
2.3.3 全场景智能伙伴的诞生
NEO不再局限于“家务助手”,而是成为“全场景智能伙伴”,陪伴家庭成员在室内外的每一个重要时刻,开启了家庭机器人服务的新篇章。
三、Redwood AI模型的行业影响与未来展望
%20拷贝.jpg)
3.1 技术路径创新:小模型撬动大场景
Redwood的成功,打破了“参数越大,能力越强”的行业迷思。其技术路径为行业带来了多重启示:
针对性优化模型架构,提升特定场景下的效率与效果
结合真实场景数据训练,增强模型的泛化与适应能力
轻量化设计降低硬件门槛,推动家用机器人普及
这种“小模型撬动大场景”的思路,为中小厂商提供了可行的创新路径,助力行业实现“降本提效”的良性循环。
3.2 场景驱动研发:需求定义技术边界
1X的研发策略,强调“以家庭需求定义技术边界”,所有功能设计均围绕真实生活场景展开。这种“场景倒逼创新”的模式,推动行业从“技术导向”向“需求导向”转型,避免了“噱头式研发”的陷阱,回归用户价值本质。
3.3 生态加速构建:硬件与模型的协同进化
Redwood模型的落地,推动了“硬件标准化+模型个性化”的生态模式。1X开放开发者平台,允许第三方基于NEO硬件开发垂直场景应用(如养老陪护、儿童教育),形成“数据反哺模型-模型优化体验-体验吸引用户”的正向循环,加速了家庭机器人功能的迭代与普及。
结论:家用机器人“类人化”新纪元的序章
%20拷贝.jpg)
Redwood AI模型的发布,不仅是1X公司技术实力的集中体现,更是家用机器人行业迈向“类人化”新纪元的里程碑。通过端到端自主操作、全身协同控制、极致轻量化等多项技术创新,Redwood让NEO机器人从“机械执行者”进化为“智能协作者”,实现了对家庭场景的全覆盖与深度融合。其安全柔性交互、户外能力拓展、生态协同进化等特性,极大提升了家用机器人的实用性与用户体验。未来,随着Redwood生态的不断完善,家用机器人有望真正走进千家万户,成为每个家庭不可或缺的智能伙伴。家用机器人“规模化落地”的倒计时,已经悄然开启。
📢💻 【省心锐评】
或许在不久的将来,每个家庭都能拥有一个会做家务、能户外奔跑、懂安全交互的 “NEO 伙伴”,而这仅仅是 1X “让机器人走进千万家” 愿景的起点。当技术突破与生活需求深度共振,属于家用机器人的黄金时代,已然开启。

评论