.png)
.jpg)
【摘要】本文系统梳理了四足机器狗在羽毛球运动中的技术突破,从虚拟孪生训练、极限视觉感知、空气动力学建模、强化学习、攻防策略到本地化部署,深度剖析其“运动员大脑”核心技术,并探讨了其在救援、民生等领域的广泛应用与未来发展方向。
引言
近年来,人工智能与机器人技术的融合不断突破人类想象的边界。曾经只会机械行走、动作笨拙的四足机器人,如今已能在羽毛球场上与人类选手一较高下。这一跨越不仅仅是硬件的升级,更是算法、感知、决策与执行系统的全面进化。苏黎世联邦理工大学团队的最新研究,将四足机器狗推向了运动竞技的前沿舞台。本文将以技术论坛的视角,全面梳理四足机器狗在羽毛球运动中的技术创新、核心算法、系统架构、实战表现及其在救援等领域的迁移应用,深度挖掘其背后的科学原理与工程实现,展望未来智能机器人在多场景下的无限可能。
一、🌐 虚拟世界的千万次修炼:数字孪生与实体操控的协同进化
%20拷贝.jpg)
1.1 数字孪生体:虚拟训练的“超级教练”
1.1.1 虚拟环境中的高强度训练
四足机器狗的“羽毛球天赋”并非天生,而是源自于数字孪生体在虚拟世界中的千万次高强度训练。研究团队为机器狗构建了高度还原的数字分身,在虚拟环境中模拟各种击球动作与步伐训练。通过不断迭代,机器狗在虚拟世界中积累了丰富的“肌肉记忆”,实现了从“零经验”到“专业选手”的飞跃。
1.1.2 虚实结合:数据回传与实体复现
虚拟训练的最大价值在于其成果能够实时回传至实体机器狗。每一次虚拟击球、每一次步伐调整,都会转化为实体机器狗的动作指令。这样,机器狗无需依赖繁琐的人工编程,就能精准复现经过优化的击球轨迹与身体协调方案,极大提升了学习效率和动作精度。
1.1.3 训练流程图
1.2 0.5秒生死时速:极限视觉系统的挑战与突破
1.2.1 视觉感知的瓶颈
羽毛球运动对反应速度的要求极高。受限于机载摄像头0.5-0.7秒的画面捕捉时间,机器狗必须在亚秒级时间内完成击球点预测与动作规划。传统视觉算法在动态追踪中存在视野盲区,导致早期测试中漏球率高达40%。
1.2.2 感知系统的重构
为突破这一瓶颈,团队对感知系统进行了彻底重构。通过引入高帧率立体相机、全局快门技术,并结合多模态传感器融合,极大提升了羽毛球的捕捉精度和追踪速度。新系统将羽毛球定位误差控制在3厘米以内,为后续决策算法提供了坚实的数据基础。
1.2.3 视觉系统优化流程
采集高帧率图像流
多模态传感器融合
实时目标检测与追踪
误差校准与数据滤波
动作规划输入
二、🧠 三大核心技术:赋予机器狗“运动员大脑”
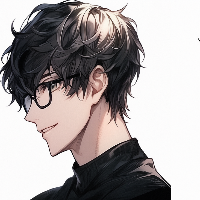
2.1 空气动力学模型:为羽毛球装上“GPS”
2.1.1 轨迹预测的物理引擎
羽毛球的飞行轨迹极为复杂,受重力、空气阻力、击球角度等多因素影响。团队基于非线性空气动力学特性,建立了包含重力、空气阻力、击球角度的运动方程。通过正交分解法解析羽毛球飞行轨迹,并结合大量实测数据校准空气阻力系数,最终构建出误差小于5厘米的实时预测模型。
2.1.2 轨迹预测模型核心参数
2.1.3 预测流程
2.1.4 计算效率
该模型能在0.3秒内完成羽毛球落点的高精度预测,为后续动作规划争取了宝贵的时间窗口。
2.2 强化学习:机器狗的“肌肉记忆”训练
2.2.1 非对称行动者-评论家框架
机器狗的动作策略优化采用了非对称行动者-评论家(Asymmetric Actor-Critic)强化学习框架。在虚拟环境中,机器狗与千万种击球场景对抗,通过奖惩机制不断优化动作策略。
2.2.2 训练成果
机械臂挥拍速度提升至12米/秒
四足横移速度达50厘米/秒
复杂球路拦截成功率由20%提升至85%
“眼-脑-身”实现毫秒级协同
2.2.3 训练流程
2.3 假想敌系统:预判对手的“读心术”
2.3.1 动态对手建模
机器狗不仅要击球,更要懂得“攻防博弈”。团队构建了动态对手模型,实时模拟人类球员可能的12种攻击路线。机器狗在击球前0.2秒内评估对手威胁度,调整击球角度(精度±2°)与力度(误差±5%),将回球落点控制在对手防守盲区。
2.3.2 攻防策略优化
对手被动回球率提升60%
创造连续10回合对打记录
实现“中心回位”战术,击球后自动向场地中心移动,模拟人类专业选手的战术思维
2.3.3 姿态控制与动态平衡
击球后,机器狗易出现身体失稳。为此,团队开发了全身动力学协调算法。后腿电机在挥拍瞬间同步输出反向扭矩,0.1秒内将身体重心回正,确保后续移动的稳定性。该技术使机器人在快速横移中击球的成功率提升30%。
三、🛠️ 本地化部署与硬件适配:让每只“笨狗”都能变高手
%20拷贝.jpg)
3.1 离线对打的自主芯
3.1.1 本地AI系统集成
整套AI系统集成于Jetson AGX Orin模块,无需云端依赖即可实现60Hz的实时决策。通过模型轻量化优化,将轨迹预测算法算力需求降低40%,使同型号机器狗只需导入数据包,即可在羽毛球馆、户外等复杂环境中独立对战。
3.1.2 本地化部署优势
无需外部算力支持
适应多种环境(室内、户外)
快速迁移与部署
数据安全与隐私保障
3.2 硬件适配的模块化设计
3.2.1 结构优化
采用ANYmal-D四足底盘与DynaArm动力臂组合,球拍以45°角优化安装,提升击球效率。ZED X立体相机配合全局快门技术,将羽毛球定位误差控制在3厘米以内,为算法运行提供高精度感知输入。
3.2.2 硬件配置表
四、🏆 实战表现:从实验室到“羽毛球场”的跨越
4.1 数据见证的技术突破
4.1.1 速度与精度
最快0.8秒完成“观测-预测-反击”闭环
横移速度达0.5m/s
发球区拦截成功率98%
10米外高速球反应时间优于人类平均水平(0.4秒 vs 人类0.5-0.6秒)
4.1.2 智能化战术
自主开发“中心回位”策略
击球后自动向场地中心移动
模拟人类专业选手的战术思维
4.2 现存挑战与未来方向
4.2.1 挑战
面对时速超300km/h的扣杀球时,成功率降至60%
主要受限于相机帧率(60Hz)与机械臂加速度极限
4.2.2 未来发展
引入高速视觉传感器
采用轻量化碳纤维臂
目标将反应时间压缩至0.3秒
实现与职业选手的对抗级表现
五、🚑 不止于球场:四足机器人的救援新使命
%20拷贝.jpg)
5.1 越野能力的隐藏技能
5.1.1 动态平衡算法的迁移
在羽毛球运动中锤炼的动态平衡算法,使机器狗在30°斜坡、碎石路面的移动稳定性提升50%。搭载的双目视觉系统可切换至地形建模模式,实时构建三维环境地图,为复杂地形中的物资运输、灾害勘察提供技术储备。
5.2 从运动到民生的技术迁移
5.2.1 “救援犬2.0”计划
团队已启动“救援犬2.0”计划,将羽毛球训练中积累的快速决策、全身协调技术应用于废墟搜救场景。测试显示,装备救援模块的机器狗可在倒塌建筑中以0.8m/s速度稳定移动,同时完成生命信号检测与障碍物翻越,展现出远超传统轮式机器人的复杂环境适应性。
结论
四足机器狗在羽毛球运动中的突破,标志着智能机器人从“机械笨狗”向“运动员大脑”的进化。虚拟孪生体的高强度训练、极限视觉系统的重构、空气动力学与强化学习的深度融合、攻防策略的智能优化,以及本地化部署与硬件适配的工程创新,共同铸就了机器狗在球场上的卓越表现。更为重要的是,这些技术的积累与迁移,正在推动四足机器人在救援、民生等更广阔领域的应用落地。未来,随着感知、决策与执行系统的持续升级,智能机器人将在更多极限场景中展现出超越人类的能力,成为人类社会不可或缺的智能伙伴。
📢💻【省心锐评】
当精准控制与智能算法碰撞,机器人不再是冰冷的执行工具,而是能在复杂场景中自主思考、灵活应对的 “伙伴”。或许不久的将来,我们会在更多领域看见它们矫健的身影 —— 毕竟,能打好羽毛球的机器狗,还有什么不可能?

评论