.png)


【摘要】单张照片生成可无限缩放多尺度3D世界的关键技术与应用解读
引言
单图生成 3D 场景已经不再新鲜,从 NeRF 到高斯泼溅,再到各类世界模型,业内已经走过几轮迭代。真正的难点不再是“能不能从一张图还原三维世界”,而是“这个世界能不能在多个尺度上都站得住脚”。很多系统在一个视距下效果不错,一旦连续放大,就会暴露模糊、扭曲、结构不连贯等问题,很难支撑从城市级到微观级的连续探索体验。
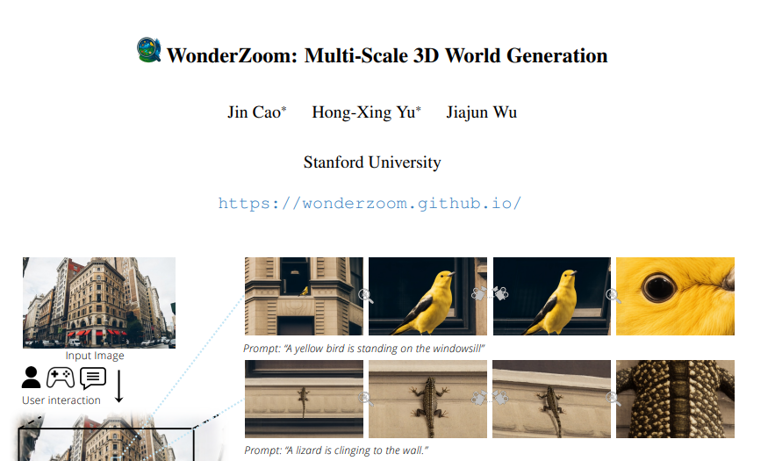
斯坦福大学曹金、余弘星、吴嘉俊团队在 2025 年发布的 WonderZoom,将问题边界再往前推进了一大步。根据团队发表在计算机视觉顶级会议和 arXiv 的论文 WonderZoom arXiv:2512.09164v1,这套技术在单图 3D 生成的基础上,引入了尺度自适应高斯表面元、多视角扩散建模、渐进式细节合成与实时渲染管线,目标是从一张照片直接生成一个可以持续放大、跨尺度一致、可编辑的 3D 世界。
这篇文章站在工程视角,围绕“单张照片 → 可无限放大的 3D 世界”这一主线,对 WonderZoom 的技术路线、关键机制和工程取舍做一次系统梳理,并结合业内已有实践,讨论它在游戏、影视和数字孪生等场景中的落地价值与现实约束。
一、WonderZoom 出现的背景与问题边界

1.1 传统 3D 重建的局限
多视角几何重建在工业界已经非常成熟,从 SfM、MVS 到各类 SLAM 管线,基本套路清晰。问题在于,传统重建有几条硬约束,在单图、多尺度场景下难以成立。
一方面,传统方法严重依赖多视角输入。需要足够数量、足够基线的照片,配合相机姿态或位姿估计,才能稳定恢复几何结构。单张图只有一个投影,几乎没有冗余几何信息。靠几何方法硬解,解空间巨大,很容易退化到先验极强的特定场景。
另一方面,传统重建的目标主要是几何精度和表观还原,而不是多尺度一致性与可编辑性。你可以用高精度 MVS 得到一片城市的高模,再配上贴图,很适合离线渲染,但很难做到从城市俯视一路平滑缩放到单个窗框的螺丝,再到材料微结构。这类多尺度世界,过去通常通过多套模型手工分层完成,代价很高,风格一致性也难保证。
1.2 生成式世界模型的短板
近年来的生成式方法把门槛压低不少。无论是基于 NeRF 的文本驱动场景生成,还是 OpenAI 等团队的世界模型和视频生成,已经可以在单一尺度上合成质量不错的 3D 或 4D 片段。
问题在于,多数方法只在一个“工作视距”附近表现稳定。在这个范围内,几何和纹理相对合理,一旦视距偏离太多,尤其是向极端近景拉近,模型开始暴露两类问题。
第一类是分辨率和细节问题。生成模型通常在固定分辨率上训练,或者只做少量多尺度金字塔。放大倍数过大后,很多方法只能通过插值或简单超分辨“硬撑”,几何结构没有实质提升,边缘和纹理开始糊成一团。
第二类是语义与几何不一致。世界模型在训练时更多关注时间连贯、局部合理,对跨尺度约束不敏感。结果是在不同缩放级别下,物体的形态和纹理可能发生漂移,用户眼里就是“放大之后变了一个东西”,严重影响沉浸感。
1.3 WonderZoom 的定位与贡献
在这样的背景下,WonderZoom 的目标非常明确。
一是输入极简,只需要单张照片,不要求相机参数或额外传感器。二是输出不止是一个静态视角,而是一个可以交互浏览的三维世界,支持用户在其中自由移动视点和缩放。三是在缩放这一维度上做到**“尽可能连续”**,在宏观场景、中观物体和微观细节三个层面保持风格、语义和几何上的统一。
为达成这个目标,WonderZoom 做了几项关键选择。场景表示上采用尺度自适应的高斯表面元,把每个 3D 元素和其“天然尺度”绑定。几何和纹理生成上采用渐进式细节合成,按需生长细节,而不是一次性生成全分辨率世界。输入不足的问题通过多视角扩散模型补齐,用“虚拟摄影师”弥补单图的视角缺失。整个系统则落在高性能实时渲染管线上,保证体验流畅。
从研究范式看,WonderZoom 把传统 3D 重建、生成式模型、世界模型和实时渲染的思路耦合在一套统一架构里,形成了相对完整的解决路径。
二、整体架构与工作流程
2.1 单张照片到初始 3D 场景
从工程角度看,WonderZoom 的整体流程可以拆成几个阶段。为了便于阅读,可以先看一个简化的处理链。
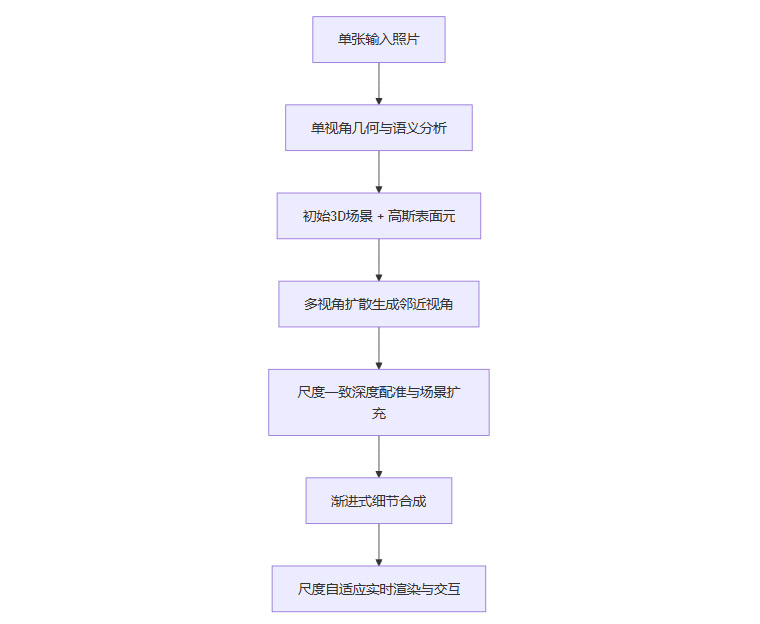
第一步是对单张照片做深度估计和语义分割,得到一个粗略的深度图和语义标签,再通过反投影建立初始 3D 点云或表面表示。这里会结合单目深度网络和预训练语义模型,尽量在初始阶段把显著物体和背景分开,为后续细节合成提供语义锚点。
第二步是将这些点云或表面转化为高斯表面元。每个表面元包含位置、法线、协方差、颜色等信息,同时绑定一个后面会频繁提到的原生尺度。这一步可以视为把稠密的图像信息“稀疏但结构化”地搬到 3D 空间中,为实时渲染打基础。
2.2 多尺度世界的生成路径
初始 3D 架子搭好后,WonderZoom 不会一次性生成所有尺度上的细节,而是采用按需增量生成策略。
当用户仅在较远视距浏览时,只渲染原始高斯表面元即可,这个阶段更像传统的单图 3D 重建。只要初始深度和表观估计质量还可以,远景观感就不会太差。
当用户对某个区域进行连续放大时,系统会触发渐进式细节合成器。它会先在当前尺度上进行超分辨和细节预测,再结合语义信息和多视角推理,生长出更细的几何结构与纹理,并将新的细节挂接到场景对应位置。用户越是进一步放大,该区域会被多次细化,逐步形成一个多层级的局部世界。
整个过程类似在已有三维世界上“局部长肌肉”。骨架来自初始重建和多视角补全,肌肉和皮肤则来自渐进式生成模块。
2.3 与 WonderWorld 等方法的关系
在 WonderZoom 之前,吴嘉俊团队的 WonderWorld 已经展示了单图生成 3D 世界的可行性。WonderWorld 更关注从一张图打造一个可探索世界,在场景范围和整体一致性上走得更远,但在极端近景的细节连续性上仍有明显短板。
WonderZoom 可以视为在 WonderWorld 的框架上,对多尺度问题的一次集中攻坚。两者在目标上有交集,但技术重心不同。WonderWorld 更偏整体世界构造和时空一致性,WonderZoom 则在尺度管理、高斯表征和细节合成上做了更强约束。
对实际工程团队来说,更有意义的点在于,WonderZoom 所采用的很多设计思路,比如原生尺度、高斯表面元、多视角扩散配准,可以被拆解后嵌入现有管线,为自家系统增加多尺度能力,而无需整体替换。
三、关键技术一 尺度自适应高斯表面元

3.1 高斯表征回顾
高斯泼溅在近两年快速走红,是因为它在渲染效率和表达能力之间给出了一个不错的折中。传统网格更适合规则几何,体渲染更适合体积效应,而高斯表面元本质上是“带方向的软点”,通过大量高斯叠加,可以高效近似复杂表面和细节。
与 NeRF 这类隐式体密度场相比,高斯表征在两点上优势明显。一是渲染开销更可控,可以借助 GPU 的光栅化管线做加速。二是结构更显式,利于编辑和裁剪,也利于做各种基于尺度的调度。
WonderZoom 在此基础上,引入了尺度自适应机制。
3.2 原生尺度的设计
WonderZoom 为每个高斯表面元附加了一个关键属性原生尺度,可以理解为该高斯最适合被用户看到的缩放级别。
粗略讲,原生尺度的确定会综合三个因素。第一是几何大小和空间覆盖范围。覆盖区域越大,其原生尺度越偏向远景级别。第二是纹理频率和信息密度。纹理细节丰富的区域,更适合作为近景尺度的候选。第三是与相邻高斯的关系,需要控制不同尺度的高斯在空间上的分布,避免大量近景高斯挤在一起造成冗余。
有了原生尺度,系统就可以按尺度对高斯分层管理。相机在远处时,只激活宏观层级的高斯,保证渲染开销和画面干净。相机靠近某个区域时,宏观高斯逐步退场,微观高斯逐步上线,实现一个连续的层级切换。
3.3 渲染时的尺度选择策略
渲染阶段,WonderZoom 需要解决一个核心问题,就是在当前相机配置下,哪些高斯应该参与渲染,参与到什么程度。
它采用的是一种基于视距和屏幕投影大小的综合策略。对于每个高斯,系统根据其空间位置和原生尺度,计算在当前视角下的屏幕占比。如果占比远小于其设计原生尺度,说明用户看不出它的细节,可以直接减弱甚至忽略。如果占比接近,其贡献权重提升。如果占比远大于原生尺度,那通常意味着需要有更细的同类高斯来接力,当前这一层的高斯则逐渐淡出。
这套机制搭配透明度调制,可以形成一种连续而非离散的 LOD 管理。传统 LOD 经常在切换时出现“跳变”和闪烁,高斯加权方式可以把这种切换平滑掉。
可以用一个简单表格,对比几种常见 3D 表征在多尺度管理上的特点。
在 WonderZoom 的具体实现中,高斯表面元不仅是渲染的基本单位,也是后续细节生成和多视角配准的锚点。多尺度管理不是后贴一层 LOD 补丁,而是从表示层就被内建进来。
四、关键技术二 渐进式细节合成器
4.1 从粗到细的生成策略
如果只靠初始单视角重建和多视角扩散,能够获得的细节仍然有限。想要支撑连续放大,需要一个可以按需生长细节的生成模块。
WonderZoom 的渐进式细节合成器做的就是这件事。它不会在一开始就尝试把所有细节“猜”完,而是在用户交互驱动下,分层补充细节。用户放大某个区域时,系统会对这个区域及其邻域进行裁剪,作为细节生成网络的输入。网络首先做超分辨和局部增强,升级当前尺度的清晰度。随后,再根据局部语义预测和场景上下文,合成一批新的高频几何和纹理,并绑定新的原生尺度挂接回场景。
这种“从粗到细”的方式符合人类创作的直觉流程。先画大轮廓,再补局部结构,最后刻画纹理和小物体。对算力资源也是一种更经济的利用方式,没有被用户关注的区域不会被提前细化。
4.2 语义理解与超分辨结合
细节合成本身不是新话题,传统超分辨和纹理补全已经很成熟。但单纯的超分辨只能生成局部纹理增强,很难在几何和结构层面给出合理补充。
WonderZoom 在这一块的关键是把语义理解和超分辨结合。在局部细节生成前,系统会利用语义分割和视觉编码器,对当前区域的语义类别和结构特征做一个较强的建模。是花瓣、叶片、石头,还是金属表面,这些信息会作为条件输入细节合成网络。
这样,网络可以利用不同类别背后的先验结构知识。对花瓣可以生成合理的脉络,对叶片可以生成方向一致的叶脉,对金属可以生成符合光照方向的高光和划痕。这种基于语义的细节生成,比纯粹的纹理风格迁移更稳定,也更容易在多次放大后保持结构不崩。
4.3 文本引导与内容编辑
WonderZoom 的细节合成器还支持文本引导编辑。用户可以对某个区域给出描述,例如希望在花朵附近出现一只黄色小鸟,系统就会在合适的尺度和空间位置注入相应的 3D 内容。
这一步在实现上会用到条件扩散模型。文本被编码成语义向量,与当前图像和几何特征一起输入扩散网络。网络在生成过程中既要满足文本提示,又要和原有场景的光照、风格保持一致。最终得到的结果会被再投影回 3D,通过深度对齐和尺度匹配,生成新的一组高斯表面元。
这意味着 WonderZoom 不只是一个浏览器,更是一个多尺度 3D 世界的编辑器。在创作工作流中,可以利用它快速从单图生成一个基础世界,再通过交互式编辑填充故事元素或玩法元素。
五、关键技术三 多视角扩散与尺度一致深度配准
5.1 单视角信息缺失的问题
单张照片的硬伤在于只能看到一个投影面。无论深度估计多强,对背面和严重遮挡区域,依赖的都是推断而非观测。
如果只在这个单视角上做细节合成,场景的 3D 结构会非常脆弱。一旦用户从另一个角度观察,就会出现“纸片化”或明显错误的遮挡关系,整个沉浸感会立刻坍塌。
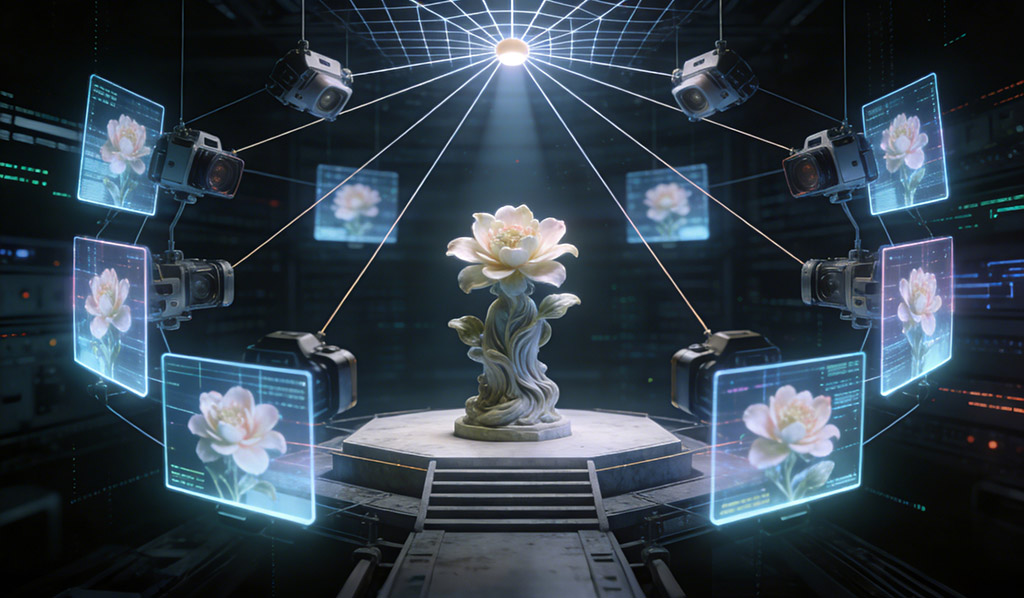
WonderZoom 的做法是通过多视角扩散模型来“补拍”虚拟视角,再把这些虚拟视角投回 3D 统一场景。
5.2 多视角扩散建模
多视角扩散可以理解为一种条件视频生成。给定原始图像和相机视角信息,模型需要生成一组相邻视角的视频帧,要求时序和视差一致。
WonderZoom 此处参考了近年来多视角视频扩散的设计思路。输入包括原图、预估深度和候选相机轨迹,扩散模型在噪声空间逐步迭代还原一段短视频。每一帧对应一个新的虚拟视角,帧间的关系受到共享潜在表示的约束,可以保持足够的视差一致性。
这样一来,原始的单视角就被扩展成一个稀疏的多视角观测集。尽管这些观测来自生成模型而非真实拍摄,但在统计意义上更符合场景的三维结构,而不是完全凭几何插值。
5.3 尺度一致深度配准
有了多视角图像,下一步是把它们全部纳入同一个 3D 世界。这一步如果处理不当,很容易出现尺度漂移和对不齐的问题。
WonderZoom 在这里引入了尺度一致的深度配准机制。每一视角的深度图会先经过单视图深度网络估计,再通过多视角几何和优化算法进行联合调整。目标是找到一组相机位姿和尺度因子,使得所有视角下的高斯表面元尽量对齐,同时尊重各自的语义和图像一致性。
在这个过程中,原生尺度再次发挥作用。配准过程中,系统会优先对齐高层级、高置信度的宏观结构,把它们当作强锚点,随后再对局部小尺度结构做细调。这样可以减少由于局部纹理噪声带来的全局几何漂移。
最终得到的是一个在多视角、多尺度下都相对一致的三维场景,为后续的渐进式细化提供可靠的骨架。
六、关键技术四 实时渲染与尺度感知呈现
6.1 渲染管线优化
高斯表面元的另一个重要价值在于,可以较自然地映射到 GPU 的实时渲染管线。每个高斯可以被视为一个带有空间分布的点精灵,通过合适的着色器和混合策略,可以高效绘制大规模点云。
WonderZoom 的渲染管线主要围绕几个方向做优化。首先是基于视锥的裁剪和分块,只渲染当前视野和邻近区域的高斯,节省大量带宽和计算。其次是按尺度和贡献做排序,优先绘制宏观结构,再逐步补充细节,便于早期结束和分辨率自适应。最后是通过批量化和数据压缩,降低显存占用,把场景控制在普通消费级 GPU 也能承载的范围内。
在公开数据中,WonderZoom 的渲染速度可以达到约 97 帧每秒量级,同时把显存占用压到 3–4GB 左右,这在复杂多尺度场景下是一个相当实用的水平。
6.2 尺度感知透明度调制
WonderZoom 在视觉体验层面引入了一个细节,但对效果影响很大,就是尺度感知透明度调制。
简单说,每个高斯的可见度不仅取决于传统的深度和遮挡关系,还取决于当前视距和原生尺度。尺度越偏离原生区间,高斯的透明度就越高,逐步“隐身”。这样可以避免在远景时出现大量微小高斯造成的噪点,也可以避免在近景时宏观高斯挡住细节高斯。
这种调制是一种连续函数,而不是硬阈值切换。配合前面提到的尺度加权渲染,可以形成一种柔和的层级过渡。用户在放大或缩小时,不会突兀地感知到“模型换了一层”,而是感觉所有细节都在自然生长和消退。
6.3 性能数据与工程权衡
在和传统 NeRF 或体素方案的对比中,WonderZoom 的工程权衡非常明确。它没有追求极端的物理精度或体积光效,而是优先选择更轻量的表面近似和简单光照模型,用来换取实时渲染能力。
这种取舍更贴近游戏引擎或交互式可视化的需求。对很多应用来说,几何上 90 分且一路流畅,比几何上 99 分但只有 1–2 帧每秒更有价值。
从架构视角看,如果团队已有基于高斯泼溅或轻量 NeRF 的渲染模块,可以参考 WonderZoom 的尺度管理思路,在已有管线上叠加多尺度和透明度调制,而不必大改底层渲染框架。
七、效果评估与对比实验
7.1 主观评测设置
根据公开报道,WonderZoom 团队组织了规模在 200 人左右的人类主观评测,对比对象包括 WonderWorld、HunyuanWorld 等 3D 场景生成方法,以及 Gen3C、Voyager 等代表性视频和世界模型系统。评测维度主要集中在放大效果真实性、整体视觉质量、与文本提示匹配度三个方面。
参与者在不知道方法名称的前提下,对同一输入条件下生成的多个结果进行打分或二选一比较。评测场景覆盖自然景观、城市环境和室内空间,既有静态浏览,也有带有缩放轨迹的短视频。
结果显示,在三项指标上,WonderZoom 都拿到显著优势,超过 80% 的评测者在直接对比时更偏好 WonderZoom 的结果。其中,在“放大效果真实性”这一项上的领先最为明显,因为这正是多尺度设计发力的地方。
7.2 客观指标与性能对比
除了主观评测,团队还报告了若干客观指标和性能数据。
在几何和纹理质量方面,使用多视角一致性、结构相似度等指标,WonderZoom 在高倍放大场景下的得分高于对比方法。特别是在需要从整体场景一路缩放到局部小物体时,其他方法容易出现纹理模糊或结构残缺,WonderZoom 的表现更加稳定。
在性能指标方面,WonderZoom 的渲染帧率接近 97 帧每秒,对比部分 NeRF 类基线只有约 1.4 帧每秒的水平。显存占用也从接近 8GB 降低到 3–4GB 区间,为在中高端消费级显卡上运行创造空间。
这种质量和性能的组合,使 WonderZoom 更贴近真实应用场景,而不仅停留在研究 Demo 的范畴。
7.3 失败案例与边界条件
任何生成式系统都有边界条件,WonderZoom 也不例外。团队在论文和配套材料中也给出了一些典型失败案例。
一类常见情况是极度放大纯纹理区域。例如树皮、布料、地毯等区域,当用户持续放大时,模型会在前几个尺度生成一些合理纹理,但越往下,输入中可用的语义和结构信息越少,网络逐渐陷入重复花纹或伪细节。此时继续放大,很难得到符合真实物理结构的微观世界。
另一类失败来自于复杂遮挡或高反光材质。多视角扩散模型在这类区域生成的虚拟视角可能本身存在偏差,后面的深度配准和高斯拟合会放大这些偏差。结果是在特定视角下出现几何折叠或光照不一致的现象。
对工程团队来说,这些失败案例给出了两个重要信号。一是需要在产品层面对用户行为做适度引导,不鼓励无限在纯纹理区反复放大。二是在前端提供质量提示或“放大级别建议”,避免用户误以为所有区域都能无限放大到物理级真实。
八、典型应用场景拆解
8.1 游戏与开放世界
对于游戏和交互式虚拟世界开发者,WonderZoom 的吸引力不在于“炫技”,而在于可以重构生产方式。
过去做一个开放世界,团队需要手工搭建地形、植被、建筑,再针对关键区域制作高精模型。多尺度体验往往依赖美术团队分层制作,例如远景低模配合天空盒,中景使用中等精度资源,近景再切换到高精资源。整个过程复杂且重复度高。
有了 WonderZoom 这一类技术,工作流可以有明显变化。可以先从少量概念图或真实照片构建若干“世界种子”,通过单图 3D 生成一个可探索的基础世界,再在此基础上按玩法需求做二次编辑和细节补充。
玩家视角下,可以在一个统一世界中自然完成从俯视探索到微距观察的切换。比如在一款开放世界 RPG 中,玩家既可以俯视规划城市建设,又可以走近一朵花,看到花瓣纹理甚至昆虫翅膀结构。这种尺度跨度过去通常要靠预渲染动画或切换不同关卡实现,现在有条件在一个连续世界里完成。
8.2 影视与数字内容创作
在影视和数字内容制作中,WonderZoom 型技术可以大幅减少建模和镜头设计的成本。
以科普纪录片为例,常见的镜头是从宇宙尺度缓慢推近到地球,再进入城市、建筑、室内,最后切换到微观分子或细胞世界。这类镜头往往由多段完全不同的 CG 场景拼接完成,中间需做大量过渡设计。
如果采用多尺度 3D 世界生成方案,可以通过少量关键画面生成一个多层级世界,再用路径规划和尺度控制完成“一镜到底”式的镜头设计。导演只需在几个关键尺度上确认视觉风格和内容,技术团队则通过参数调节完成中间所有过渡段。
对于中小制作团队,这种自动化程度会显著降低预算门槛。不需要动辄几十人的建模和特效团队,也能完成过去只有大厂才做得起的多尺度镜头。
8.3 教育科普与科研可视化
在教育和科研可视化场景,多尺度本身就是天然需求。教师讲解一朵花的结构时,如果能让学生从花海俯视图一路放大到细胞层级,感知会远强于按 PPT 页切换的静态图片。
WonderZoom 提供的能力可以让**“一张图片变成一节课的多尺度教材”**。以生物教案为例,可以选择一张典型的植物照片,生成多尺度 3D 世界后,教师在课堂上用平板或大屏带学生一步步走进花朵、叶片和根部。配合文字讲解,可以在视觉上建立完整的空间和结构认知。
在科研可视化方面,对实验数据进行拟合或风格化处理后,也可以利用类似的多尺度机制,创建“可钻入”的结构世界。例如晶体结构、材料微观孔洞等,都适合这类方式展示。
8.4 VR AR 与数字孪生
VR 和 AR 的体验,很大程度取决于内容密度和可交互层次。过去很多虚拟博物馆项目,只在宏观层面可走动,靠近展品后仍然只能看到相对粗糙的模型。
借助 WonderZoom 类型的多尺度 3D 表征,可以给每件文物建立一个多层级世界。参观者在 VR 头显中不仅可以围绕文物走动,还可以靠近到观察纹理甚至刻痕级别,甚至在更高倍下看到材料裂纹等细节。
在城市级数字孪生工程中,多尺度同样重要。宏观上看城市交通和建筑布局,中观层级查看街区风貌和店铺结构,微观层级分析局部施工细节或设备状态。虽然在这些场景中仍然需要严格几何精度和与真实数据的映射,但 WonderZoom 在交互和可视化层面提供了一个可参考的多尺度组织方式。
九、局限性与未来演进方向
9.1 纯纹理区域的“信息耗尽”
前文已经提到,WonderZoom 在极度放大纯纹理区域时,会出现信息耗尽的问题。这个问题的根源不只在于网络能力限制,而在于输入信息本身不足以支撑无限推断。
树皮、织物、墙面这类区域,在宏观尺度上有明显纹理和形状,但在微观尺度上,其真实结构由材料科学和物理规律决定,和人眼看到的宏观纹理并非简单缩放关系。模型即便能在若干尺度上生成合理变体,终究会进入一个“自由发挥”的区间,很难保证和真实世界一致。
解决这一问题,单靠通用扩散模型和语义理解不够,需要引入更明确的物理先验和程序化生成机制。例如针对某些材料,引入基于物理的程序纹理,把宏观纹理特征映射到一组物理参数,再在更细尺度通过物理模型生成微观结构。
9.2 动态场景与时间维度
目前的 WonderZoom 主要针对静态场景。这一点从技术论文和示例中都能看出,时间维度只在多视角扩散阶段作为帮助约束存在,最终输出的世界是静态 3D。
现实世界中,大量场景本身具有明显动态。植物生长、云层流动、水体变化、行人车辆移动,这些现象在多尺度下会呈现不同形态。未来如果要把 WonderZoom 的多尺度思路扩展到时空 4D 世界,需要解决两个方向的难题。
第一个方向是时间维度的表征与压缩。不能简单在每一时间片都构建一套完整多尺度高斯世界,否则存储和算力都会失控。更可能的方案是在高层级上显式建模时间,再通过条件生成在局部尺度补充动态细节。
第二个方向是跨尺度的一致性约束。一个物体在不同尺度上的动态行为,应该在统计意义上对得上,而不是宏观上风平浪静,微观上剧烈震颤。如何在训练和推理时把这种约束编码进网络,是一个新的研究方向。
9.3 工具链与易用性
从研究到生产,中间还隔着一整套工具链建设。当前 WonderZoom 还处于研究原型和学术开源阶段,主要面向研究者和高级开发者。距离面向普通用户的一键应用,还需要几个关键环节。
首先是易用前端。研究原型一般以脚本和配置为主,而面向创作者,需要提供所见即所得的编辑界面,可以在 3D 视图中直接选择区域、设定放大层级、输入文本提示,并即时查看效果。
其次是和现有引擎的整合。无论是游戏引擎、DCC 工具还是工业仿真平台,都有自己的资产格式和渲染管线。WonderZoom 类型的多尺度高斯世界,需要一个稳定的中间表示和导出方案,方便和现有资产共存。
最后是算力与部署模式。当前这类系统在开发阶段通常依赖高性能 GPU 集群,而真正要落到终端设备,需要云渲染、本地轻量推理或两者结合的多种方案。每种方案在成本和延迟上的权衡都不一样,需要结合具体业务设计。
结论
从单张照片合成一个可无限缩放的 3D 世界,这件事在很多年里只存在于概念方案和 Demo 中。斯坦福大学团队在 WonderZoom 中,给出了一个具有完整技术闭环和实际可用性能的实现路径。
这条路径的核心不在某个单点算法,而在整体架构设计。尺度自适应高斯表面元把多尺度管理嵌入到底层表示,多视角扩散与尺度一致深度配准为单图补齐了足够的三维约束,渐进式细节合成器承担起按需生长局部世界的职责,而实时渲染与透明度调制则让整个系统具备了交互体验。
从工程实践角度看,WonderZoom 提供的更像是一套可复用的设计模式。真正落地时,团队可以按需采纳其中的某些部分,在自身业务框架里重构多尺度能力,而不必完整照搬。
从行业趋势看,多尺度一致的 3D 世界生成,会在未来几年逐步成为游戏、影视、VR 以及数字孪生系统的一项基础能力。WonderZoom 不是这个方向的终点,但已经把问题空间和技术路径勾勒得足够清晰。
📢💻 【省心锐评】
WonderZoom 把多尺度管理前移到表示层,再配合生成式细节生长和实时渲染,为“单图造世界”给出一套兼顾质量与工程可行性的方案,值得产品与架构团队仔细拆解吸收。

评论