.png)


【摘要】探讨远程驾驶员作为人机协同安全关键环,如何通过多模态融合技术实现精准疲劳监测与分级预警。分析应急操作中的人机交互设计原则,并提出构建覆盖理论、实践与心理素质的科学化培训认证体系,以确保高度自动化下的终极安全。
引言
当自动驾驶的浪潮席卷而来,我们似乎正无限接近一个由算法和传感器主宰的交通新纪元。车辆自主决策、精准执行,仿佛人类驾驶员的角色正在被历史的尘埃悄然掩埋。但是,现实远比理想复杂。在可预见的未来,无论自动化水平多高,系统总会遇到其设计边界之外的“未知未知”(Unknown Unknowns)。这时,一个清醒、果断、技能娴熟的远程驾驶员,就成了整个系统免于灾难的最后一道防线。
这位身处千里之外的“飞手”,不再是传统意义上的驾驶员,他更像是一位高级别的系统监督者、危机干预专家。他的状态,直接决定了应急处置的成败;他的决策,关系到无数生命与财产的安全。因此,我们必须将目光聚焦于这个“最后一环”上。如何确保他时刻保持最佳状态?如何在毫秒之间实现人与机器的无缝接管?又如何系统性地培养和认证这样一批“超级驾驶员”?这三个问题,构成了远程驾驶安全体系的基石,也是我们今天要深入剖析的核心。
一、🧠 “安全哨兵”:远程驾驶员的实时疲劳监测与预警
%20拷贝.jpg)
远程驾驶员的工作环境看似安逸,实则不然。长时间面对屏幕,处理着从远端传回的高度浓缩信息,精神需要时刻保持紧绷。这种单调与高压并存的工作模式,是催生疲劳的温床。一旦疲劳侵袭,驾驶员的感知、判断和反应能力都会断崖式下跌,后果不堪设想。所以,为他们配备一个不知疲倦的“安全哨兵”——实时疲劳监测与预警系统,就显得尤为重要。
1.1 多模态融合监测的必然性
单一的监测手段,就像用一只眼睛看世界,总有盲区。例如,仅通过摄像头判断眨眼频率,可能会被驾驶员揉眼睛的动作误导;仅靠心率监测,也难以区分是疲劳还是情绪波动。所以,现代监测系统走向了多模态融合的道路,它像一位经验丰富的老医生,通过“望、闻、问、切”来综合诊断,从而得出最接近真相的结论。
1.1.1 生物传感器的“硬核”数据
这是最直接、最底层的生理状态评估。通过非接触式或可穿戴设备,系统能够捕捉到人眼无法察觉的细微生理变化,为疲劳判断提供“铁证”。
这些生物信号共同构成了一幅精细的生理画像,让系统能够洞察驾驶员内在的疲劳累积过程。
1.1.2 视觉感知的“察言观色”
计算机视觉技术赋予了系统一双锐利的眼睛,它能实时捕捉并量化驾驶员外在的行为特征,这些特征是疲劳最直观的表现。
眼部状态分析 这是视觉监测的核心。系统会重点关注PERCLOS指标(即单位时间内眼睛闭合时长所占的百分比),当该数值超过预设阈值时,通常意味着驾驶员已进入瞌睡状态。此外,眨眼频率的异常(先变快后变慢)、眼球扫视范围变窄、瞳孔对光线反应迟钝等,都是疲劳的重要佐证。
面部特征识别 系统通过深度学习算法,能够精准识别打哈欠、面部肌肉松弛等表情。连续的哈欠是身体发出的强烈缺氧和疲劳信号。
头部姿态追踪 驾驶员的头部姿态同样能说明问题。频繁点头(“点头瞌睡”)、头部无力下垂或长时间僵直,都表明其肌肉控制能力因疲劳而下降,难以维持正常的驾驶姿势。
1.1.3 驾驶行为的“蛛丝马迹”
除了观察人,系统还会分析人的操作。驾驶员的行为数据是其认知状态的直接反映。
操作稳定性分析 对方向盘(或操作杆)的微小修正频率和幅度进行分析。疲劳的驾驶员操作会变得迟缓且不稳定,修正动作要么过大,要么过小,呈现出一种“忽左忽右”的漂移感。
车辆轨迹偏离 远程控制的车辆或飞行器轨迹同样是关键数据。频繁偏离预定路线或航线、压线行驶等,都可能是驾驶员注意力涣散、感知判断能力下降的结果。
响应延迟评估 系统可以设计一些隐蔽的测试,例如在界面上短暂显示一个需要确认的次要信息,然后测量驾驶员的响应时间。响应时间的显著延长是认知疲劳的典型特征。
通过融合上述三大维度的数据,并利用主成分分析(PCA)或更复杂的AI算法进行加权计算,系统能够构建一个高度可靠的疲劳评估模型。这个模型不仅能克服单一数据源的局限性,还能在复杂光照、驾驶员佩戴眼镜或存在个体差异等挑战下,保持极高的准确率,将误报和漏报的可能性降至最低。
1.2 分级预警与干预的艺术
发现问题只是第一步,如何有效干预,将驾驶员从危险的边缘拉回来,才是关键。一个优秀的系统,其干预措施绝不是粗暴的“一刀切”,而是一套循序渐进、张弛有度的“组合拳”。
这套分级机制,体现了人机协同的智慧。它既尊重了人的主导地位,又在必要时提供了机器的刚性保障,形成了一道动态的、智能的安全防线。
1.3 技术挑战与未来展望
尽管疲劳监测技术已取得长足进步,但仍面临一些挑战。
环境适应性 复杂的光照变化(如忽明忽暗的隧道)、驾驶员佩戴墨镜或口罩,都可能对视觉识别造成干扰。
个体差异性 不同的人在疲劳时生理和行为表现各不相同,固定的阈值难以适应所有人。系统需要具备学习能力,为每位驾驶员建立个性化的基线模型。
数据融合的实时性 处理来自多个传感器的大量数据并实时做出判断,对系统的计算能力提出了很高要求。
未来的发展方向将围绕这些挑战展开。AI与多模态感知的深度融合将是主流,算法会变得更聪明,能够从更细微、更复杂的信号组合中识别疲劳模式。动态阈值调整技术将使系统能够根据驾驶员的历史数据和当前情境,自动调整预警的灵敏度。边缘计算的应用,可以将部分数据处理任务放在靠近传感器的前端设备上完成,大大降低延迟。同时,集成度更高的可穿戴设备(如智能手表、智能服装)将提供更丰富、更稳定的生理数据源,让监测无处不在,却又无扰于人。
二、🕹️ “无缝切换”:应急操作与人机交互设计
%20拷贝.jpg)
当自动驾驶系统发出接管请求,或者突发事件发生时,留给远程驾驶员的反应时间可能只有短短几秒。在这千钧一发之际,人机交互界面(HMI)的设计,直接决定了接管的成败。一个糟糕的界面会让驾驶员手忙脚乱,信息过载;而一个优秀的界面,则能像一位冷静的副驾驶,清晰地呈现局势,引导驾驶员快速做出正确决策。
2.1 界面设计的“减法哲学”
紧急情况下,人的认知资源是极其有限的。所以,应急界面设计的首要原则就是信息降噪,也就是做“减法”。
聚焦核心信息 在应急模式下,界面应自动隐藏所有非必要信息(如娱乐、导航详情等),只保留最关键的数据。例如,障碍物的精确位置、相对速度、碰撞预警时间(TTC),以及车辆/飞行器的核心状态参数(速度、姿态、剩余动力)。这些信息需要以最醒目、最直观的方式呈现,比如用高亮色块、放大字体和动态箭头。
可视化与直观化 避免使用复杂的图表和文字描述。利用增强现实(AR)技术,将关键警示信息直接叠加在实时视频画面上,会比看仪表盘更直观。例如,直接在视频中标注出危险的行人,并用红色轨迹线预测其动向。
模块化与情境自适应 界面可以设计成模块化的。平时,各模块信息均衡显示。一旦进入紧急状态,系统会根据危机类型,自动调整布局,将与当前危机最相关的模块(如制动系统状态、避障路径规划)放大并置于视觉中心。这种情境自适应设计,能帮助驾驶员瞬间抓住问题的核心。
2.2 多模态交互的协同效应
人有五感,优秀的交互设计就应该充分调动它们,形成合力,确保信息传递的万无一失。
视觉 这是信息传递的主渠道。除了上文提到的高亮、放大等方式,还可以利用**闪烁、色彩变化(如从黄到红)**来表示事态的紧急程度。
听觉 声音是打破“视觉隧道效应”的利器。当驾驶员专注于处理某个视觉信息时,可能忽略屏幕其他角落的新警报。此时,具有空间感的警示音(如左侧有危险,则左侧耳机发出警报)和清晰的语音播报(“注意!左后方有车辆高速接近!”)就能起到关键的提醒作用。
触觉 触觉反馈是最直接、最难被忽略的。通过座椅、操作杆或可穿戴设备的振动,可以模拟出车辆压线时的路感,或者在特定方向产生振动以提示危险来源。这种身体层面的直接刺激,唤醒效果远胜于单纯的声光提示。
语音与手势 在紧张的操作中,让驾驶员分心去点击屏幕上的小按钮是危险的。引入语音控制(“执行紧急制动!”)和简单的手势操作,可以让他们在保持视线不离开主画面的情况下,快速执行预设指令,极大地提升了操作效率和安全性。
2.3 标准化应急流程的构建
面对突发状况,任何犹豫都可能是致命的。因此,必须预先规划好一套标准化的应急操作流程(SOP),并将其固化在人机交互系统中,让驾驶员能像肌肉记忆一样快速调用。
下面是一个典型的远程接管应急流程示意图。
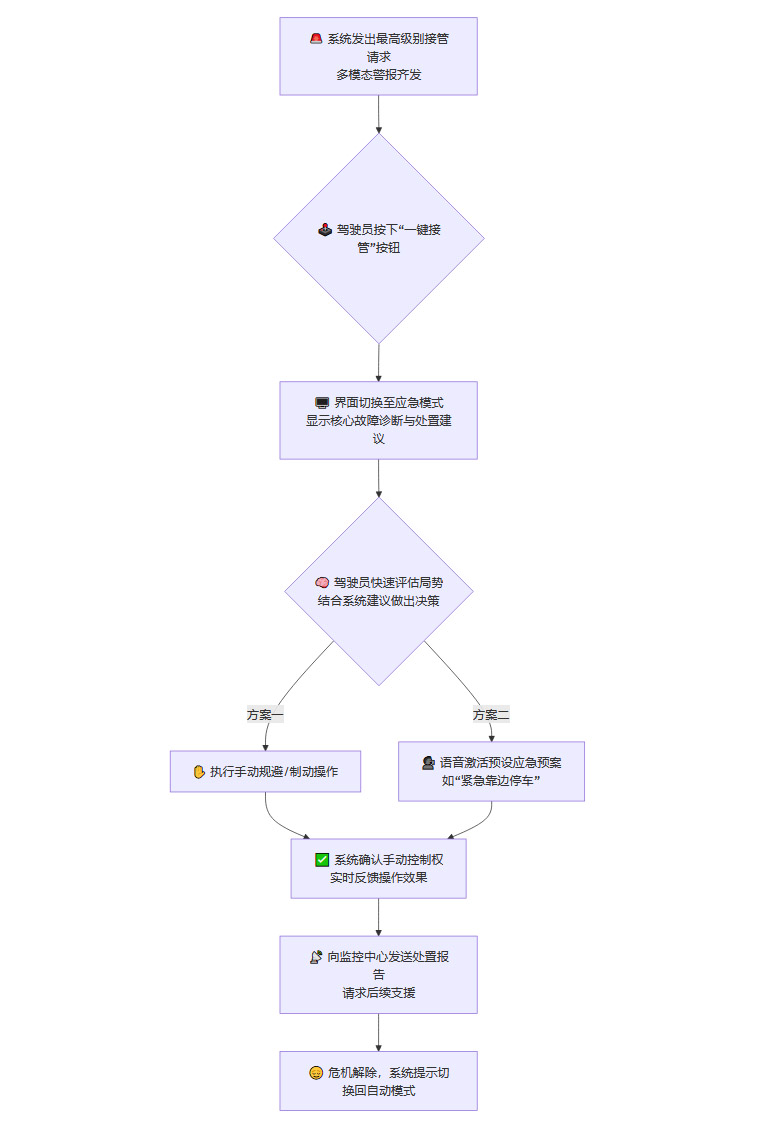
这个流程的关键在于快速响应和减少认知负荷。
一键切换 避免了多层菜单的繁琐操作,确保驾驶员能在第一时间夺回控制权。
系统建议 AI可以在瞬间计算出多个备选避险方案,并以可视化的方式呈现给驾驶员,辅助其决策,而不是让他独自面对一个完全未知的问题。
秒级响应 整个系统的设计必须确保极低延迟。从远端车辆/飞行器传感器捕捉到异常,到信息显示在驾驶员屏幕上,再到驾驶员的操作指令回传,整个链路的延迟必须控制在毫秒级。这背后需要5G、卫星通信甚至量子通信等前沿技术的支撑,以及**精确的时间同步协议(如PPS信号同步)**来保障。
2.4 个性化与适应性调整
每个驾驶员的操作习惯和反应模式都不同。一个僵化的系统无法发挥出所有人的最佳水平。因此,未来的HMI设计将更加注重个性化。
系统可以记录每位驾驶员的操作数据,学习他们的习惯,从而自定义界面布局和快捷键。更有趣的是,HMI可以与疲劳监测系统联动。当监测到驾驶员处于轻度疲劳状态时,系统可以自动调高警示音量、增加视觉元素的对比度,甚至简化某些操作选项,以补偿其下降的认知能力,实现真正的动态人机适应。
三、🎓 “铸魂育人”:构建科学的“飞手”培训与认证体系
%20拷贝.jpg)
再先进的监测技术,再人性化的交互界面,如果最终的使用者——远程驾驶员本身能力不足,那么整个安全体系依然是空中楼阁。技术是骨架,而人是灵魂。当前,这个新兴职业的“铸魂”工程,显然还存在诸多短板。我们必须正视这些问题,并着手建立一套真正科学、严格、且能够与时俱进的职业标准。
3.1 现实的窘境:当前培训体系的“软肋”
远程驾驶员并非一个简单的岗位,但目前行业内的培训与认证现状却不容乐观。许多问题交织在一起,形成了一个制约行业健康发展的瓶颈。
标准缺失与各自为政 缺乏一个全国性或行业性的统一培训大纲和考核标准。各家企业自行其是,培训内容深浅不一,考核尺度松紧各异。这导致“飞手”的能力水平参差不齐,为安全埋下了巨大隐患。
“旧瓶装新酒”的转岗模式 一个普遍现象是,大量远程安全员由传统网约车或货运司机转岗而来。他们或许拥有丰富的道路驾驶经验,但对于远程操作系统、网络延迟、传感器数据解读以及极端情况下的远程应急处置,却缺乏系统性的专业培训。这种简单的“平移”,很容易在关键时刻导致事故。
重理论轻实战的培训内容 部分培训机构的课程过于偏重理论知识和基本操作,而对于最能考验驾驶员能力的模拟极端场景训练投入不足。驾驶员可能熟知所有按钮的功能,却从未在模拟的暴雨、冰雪或信号中断环境中进行过一次接管演练。
“一考定终身”的认证模式 获得认证后,缺乏持续的能力评估和反馈机制。驾驶员的技能是否会随着时间推移而生疏?他们是否能跟上系统软件的快速迭代?这些问题,在现有的体系下往往被忽视了。
3.2 重塑标准:科学培训与评估机制的蓝图
要解决上述问题,就需要从顶层设计入手,构建一个覆盖“选、育、用、留”全流程的职业发展体系。这个体系的核心,是科学的培训内容、严格的评估标准和持续的能力进化机制。
3.2.1 知识与技能的矩阵:全面的培训内容
未来的“飞手”培训,必须是一个理论与实践深度结合的综合性工程。其内容应远超传统驾驶培训的范畴。
3.2.2 能力的试金石:多维度评估与认证
培训的效果需要通过严格的评估来检验。认证标准必须是多维度的,全面考察候选人的综合素质。
通过这四重考验的驾驶员,才能获得从业资格。并且,可以根据其在复杂和应急场景下的表现,建立分级认证体系。例如,初级认证允许操作标准路况,中级认证可处理复杂天气和交通环境,而高级认证则有资格参与新系统测试或处理最高风险的应急事件。
3.3 永不止步:持续能力评估与数据驱动的优化
获得认证仅仅是职业生涯的开始。在一个技术飞速迭代的领域,知识和技能的“保鲜期”非常短。因此,必须建立一个持续的能力进化闭环。
建立个人职业档案 为每位“飞手”建立一个动态的电子档案。这个档案不仅记录其初始的培训和认证成绩,更重要的是,会持续追踪其上岗后的每一次接管操作、每一次应急处置的详细数据、日常工作的疲劳监测报告等。
定期的能力复核与回访 实行定期的复训和复核制度。例如,每半年或一年,驾驶员需要重新回到模拟器上,完成最新的应急场景测试,以确保其技能没有退化。同时,管理人员应定期进行一对一回访,了解其工作中的困惑和心理状态。
数据驱动的精准培训 这才是持续优化的精髓。通过对所有“飞手”的操作数据进行大数据分析,可以发现共性的薄弱环节。例如,数据分析显示,超过60%的驾驶员在处理“隧道口强光突变导致传感器短暂失效”这一场景时,反应时间偏长。那么,培训部门就可以立即开发针对性的强化训练模块,并推送给所有驾驶员。这种模式让培训不再是千人一面,而是千人千面、精准“补短板”。
通过这个闭环,驾驶员的成长路径变得清晰可见,培训资源也得到了最有效的利用。整个“飞手”队伍的专业能力,将在这种持续的“实战-反馈-学习-提升”循环中,不断迈向新的高度。
结论
远程驾驶员,这个站在自动化浪潮之巅的职业,其角色正在发生深刻的演变。他们不再是方向盘的掌控者,而是整个智能交通系统的“安全守门人”。要让这最后一道防线坚不可摧,我们必须构建一个三位一体的保障体系。
首先,部署基于多模态融合技术的疲劳监测系统,像一个忠诚的哨兵,实时守护着驾驶员的生理和精神状态,并通过智能的分级预警,将风险扼杀在摇篮之中。
其次,精心设计高效直观的人机交互界面和标准化的应急操作流程,通过多感官协同和个性化适应,确保在万分危急的时刻,人与机器能够实现无缝、精准的权力交接。
最后,也是最根本的,是建立一套科学、严格、且持续进化的培训与认证标准。通过覆盖理论、实操与心理的全方位培养,以及数据驱动的持续能力提升,铸造出一支真正具备专业素养和强大心理素质的“飞手”队伍。
技术的发展永无止境,但对安全的敬畏之心必须始终如一。只有将人的智慧、责任与机器的精准、高效完美结合,我们才能真正铸牢远程驾驶员这道安全防线,让科技的光芒,始终照亮通往未来的平安之路。
📢💻 【省心锐评】
技术再炫,也填不了人性的坑。别总盯着算法,先把“飞手”的职业标准和心理防线建起来,否则再智能的系统也只是个昂贵的定时炸弹。

评论