.png)


【摘要】本文深入探讨2025年生成式AI如何从内容生成进化为决策生成,赋能飞行器在极端场景下对抗“墨菲定律”。文章分析了AI基于海量仿真与实时感知生成全新规避路径的技术内核,剖析了“AI幻觉”的致命风险与多层抑制方案,并展望了“世界模型”如何赋予飞行器深层物理理解与预判能力,最终迈向更安全的自主飞行时代。
引言:悬于长空的达摩克利斯之剑
在航空工程的宏伟殿堂中,“墨菲定律”——任何可能出错的事情,终将出错——如同一位严苛而永恒的导师,时刻提醒着我们天空的莫测与风险的必然。它不是悲观主义的呓语,而是对复杂系统中概率与熵增的冷静陈述。从突发的微下击暴流,到城市峡谷中不可预测的阵风;从一只意外闯入航线的飞鸟,到建筑工地吊臂的瞬间转向,这些“长尾事件”构成了悬于每一架飞行器之上的达摩克利斯之剑。
传统的自动化系统,依赖于工程师预设的“if-then”规则树,它们是经验的结晶,是确定性世界的守护者。然而,在“墨菲定律”主宰的非确定性疆域里,规则的边界就是能力的尽头。当一个从未被编码的极端场景猝然降临时,这些系统往往会陷入“决策真空”,其反应或是僵硬的预设程序,或是无助的系统失效。
然而,当时光的指针拨向2025年,一场源自数字世界的革命正悄然重塑这场人与风险的古老博弈。生成式AI(Generative AI),这个曾经以创造惊艳诗篇、绘制奇幻画作而闻名于世的技术,正经历一场深刻的范式跃迁——从一个“内容工厂”,进化为一个能够在毫秒之间挽救生命的“决策中枢”。它不再仅仅是模仿与重组,而是开始理解、推理,并为未知的问题“生成”全新的答案。
本文将深入这片激动人心的前沿阵地,探讨生成式AI如何赋能飞行器(包括无人机、eVTOL等低空飞行器),在极端场景的惊涛骇浪中,实现前所未有的自主决策与生存。我们将一同解构其技术内核,直面其核心挑战,并展望一个由“世界模型”驱动的、更智能、更安全的未来天空。这不仅是一场技术对决,更是一次智能对熵增的伟大抗争。
一、范式跃迁:从“内容工厂”到“决策中枢”的深刻进化
%20拷贝.jpg)
在生成式AI的黎明期,它更像一位才华横溢的艺术家或博闻强识的学者。我们惊叹于它能模仿梵高的笔触,能续写莎士比亚的剧本,能以人类的口吻对答如流。它的核心能力是基于海量数据进行模式学习,然后“生成”符合这些模式的新内容。这本质上是一种对已有知识的创造性重组。
但在航空这一高风险、高动态的领域,需要的远不止于此。飞行器面临的挑战不是创作一首好诗,而是在生死攸关的瞬间,做出最优的物理决策。这要求AI不仅要“知其然”,更要“知其所以然”,并能在信息不完备、时间极度压缩的条件下,进行果断的推理与行动。
1.1 传统自动驾驶的“规则囚笼”
为了理解生成式AI带来的革命性,我们必须先审视其前辈——基于规则的自动驾驶系统。这些系统是工程师智慧的结晶,其决策逻辑可以被清晰地描绘成一棵庞大的决策树。
“If-Then”的逻辑基石:系统的核心是一系列严密的条件语句。例如:“如果(IF)前方100米内出现障碍物,且(AND)障碍物相对速度大于X,那么(THEN)执行向左规避机动Y”。
可预测与可验证:这种模式的最大优点是其确定性和可验证性。对于任何给定的输入,其输出都是唯一且可预测的。这使得系统的测试、验证和认证流程相对清晰。
“已知世界”的局限:然而,其致命弱点在于它只能处理“已知”的问题。工程师无法穷尽所有可能发生的意外组合。当一个“规则之外”的事件发生时,系统便会失语。例如,一个同时遭遇强侧风、GPS信号丢失和前方多架无人机异常聚集的复合型极端场景,很可能超出了预设规则的覆盖范围。
这便是传统自动驾驶的“规则囚笼”:它在已知的世界里表现完美,却对未知的风险束手无策。它能被动地避障,却难以主动地求生。
1.2 生成式AI:打破囚笼的“决策生成者”
生成式AI的到来,彻底改变了游戏规则。它不再依赖于一个有限的规则库,而是构建了一个深层的、概率性的世界表征。当面临一个新问题时,它不是去“查找”答案,而是去“生成”答案。
这种转变的核心在于,生成式AI将决策过程从一个离散的逻辑选择,转变为一个连续的、高维的优化问题。它在学习了海量仿真和真实数据后,内化了空气动力学、物理定律和环境交互的复杂模式。
当突发状况出现时,它的“思考”过程更像一位经验丰富的王牌飞行员:
全局态势理解:它瞬间融合所有传感器数据,构建一个关于当前世界的动态、多维度的理解。
目标与约束定义:它的目标是“生存并完成任务”,约束条件包括飞行器的物理性能极限、能量限制、空域法规、乘客舒适度等。
可能性空间探索:在几毫秒内,它会在其内部的“可能性空间”中,模拟出成千上万条潜在的规避路径和机动序列。
最优解生成:通过复杂的优化算法,它会从中“生成”一条在当前约束下效用最高(即最安全、最高效)的全新四维(三维空间+时间)轨迹。
这个过程是动态的、实时的、创造性的。它生成的解决方案可能从未在任何训练数据中明确出现过,但它完全符合物理规律和任务目标。这正是从“被动避障”到“主动求生”的本质飞跃,是智能体打破“规则囚笼”,在开放世界中争取生存权的体现。
二、生存引擎:毫秒之间,生成未曾预演的生命航线
生成式AI赋能飞行器自主生存的能力,并非空中楼阁,而是建立在坚实的技术基石之上。它如同一位集“万卷书”(海量仿真数据)、“千里眼”(多模态感知)和“神算子”(实时决策生成)于一体的超级智能体。
2.1 奠基:在百万次模拟生死中汲取先验知识
飞行器无法像自动驾驶汽车那样,在真实道路上进行大规模、高风险的测试。因此,高保真仿真环境成为了生成式AI学习飞行的主课堂。在这里,AI经历了数百万小时、数亿公里的“虚拟飞行生命”。
2.1.1 强化学习与“长尾场景”的征服
AI的学习范式主要是强化学习(Reinforcement Learning, RL)。在这个过程中:
智能体(Agent):即飞行器的AI决策模型。
环境(Environment):一个高度逼真的数字孪生世界,能模拟各种天气、地形、电磁干扰和突发事件。
行动(Action):AI输出的飞行控制指令。
奖励(Reward):系统根据AI行动的结果给予的反馈。安全、平稳、高效地完成任务会得到正奖励;发生碰撞、偏离航线、能耗过高则会受到负奖励(惩罚)。
通过亿万次的试错循环,AI的目标是最大化累积奖励。它在模拟中“亲身”体验了数千次引擎失效、数万次极端气流、数百万次近距离冲突。这些在真实世界中极为罕见、数据稀疏的**“长尾场景”(Long-tail Scenarios)**,在仿真世界中被反复、高强度地训练。这使得AI对这些极端情况的应对,不再是纸上谈兵,而是内化为一种接近本能的反应模式。
2.1.2 生成式场景构建
更进一步,生成式AI本身也被用于创建训练环境。传统的仿真场景需要人工设计,而基于生成式AI的4D场景生成技术,能够自动构建从环境建模、行为重建到视觉渲染的完整链条。它可以根据简单的指令(如“生成一个傍晚时分、有中度降雨和多架无人机穿行的城市CBD场景”),自动生成无穷无尽、细节丰富且物理一致的训练数据,极大地丰富了AI的“阅历”。
2.2 感知:融合多模态信息,编织上帝视角的“世界之网”
如果说仿真是AI的“内功”,那么多模态感知就是它的“眼耳”。现代飞行器是一个复杂的传感器集合体,生成式AI的核心任务就是将这些孤立的数据流,融合成一幅连贯、精确的全局态势图。
生成式AI,特别是多模态大模型,能够像处理自然语言一样,理解这些异构数据。它不再是简单地“看到”一个点云,而是能将点云、图像和雷达信号关联起来,理解到“这是一个正在向我方移动、由金属构成的、可能是工程车辆的物体”。
以中科院自动化所研发的**“紫东长空”低空行业大模型**为例,它能够融合卫星遥感、地理信息、气象和城市交通等多源数据,为飞行器提供超越单一载具传感器的宏观“上帝视角”。这种能力使得飞行器的决策不再局限于眼前的“一亩三分地”,而是基于对更大范围时空环境的深刻洞察。
2.3 决断:毫秒间的灵光一闪,生成全新的生存之道
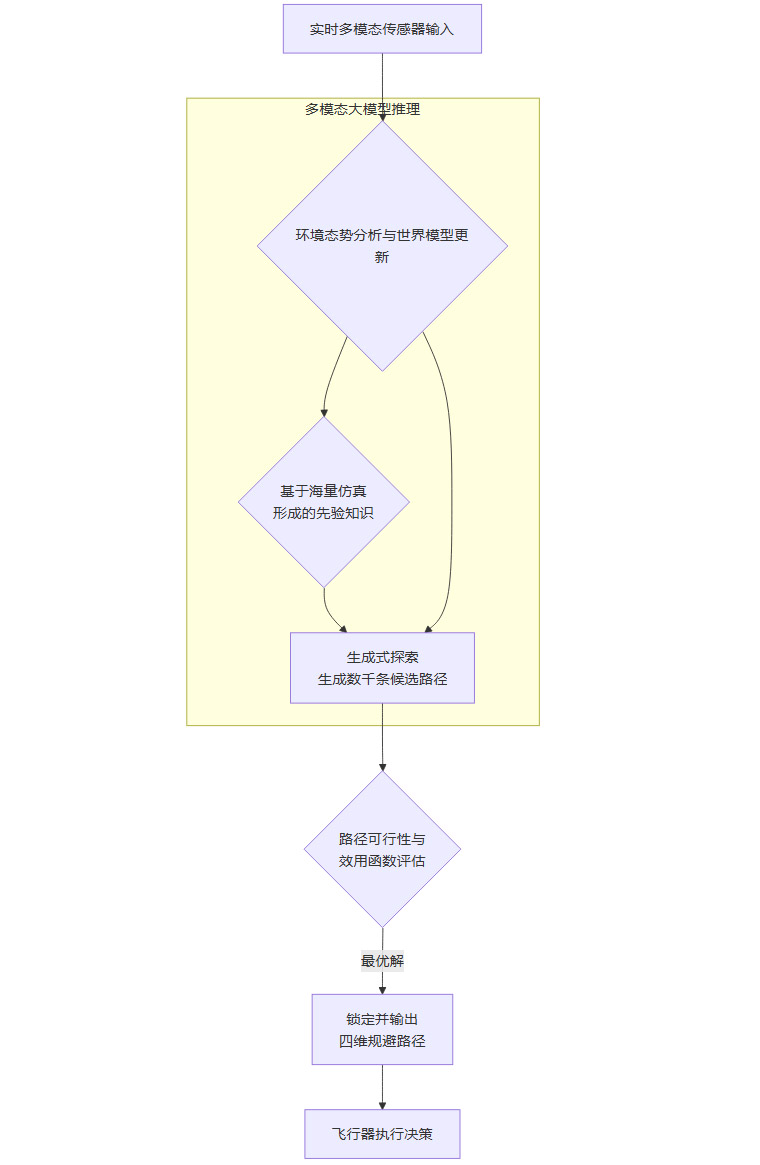
这是整个系统中最激动人心的部分。当极端事件发生——例如,在城市楼宇间飞行时,一股突发的5级强风(微下击暴流)从侧方袭来,同时前方建筑工地的吊车臂突然开始旋转,封锁了原定航线。
一个基于规则的系统可能会在此刻“死机”,因为它面临的组合是未知的。而生成式AI的反应流程如下:
状态突变捕捉(T=0ms):IMU和气象传感器检测到姿态剧变和风切变,LiDAR和视觉传感器捕捉到前方路径被动态封锁。
约束重定义(T=1-5ms):AI立即更新其内部世界模型。新的约束条件被激活:① 必须立刻抵抗强风以维持姿态稳定;② 原定路径无效;③ 必须在极短时间内找到新的安全通道;④ 新通道必须考虑风力影响下的能量消耗和机动性能限制。
生成式探索(T=5-20ms):AI的神经网络开始高速运算。它不是在数据库里搜索“遇到强风和吊车怎么办”,而是在一个由物理定律和飞行器性能构成的多维空间中,实时“生长”出数千条可能的规避轨迹。这些轨迹是连续的四维曲线,每一条都包含了未来几秒内每一时刻的位置、姿态、速度和推力指令。
最优解锁定与执行(T=20-30ms):模型对这些生成的轨迹进行快速评估,基于“安全-效率-能耗”等多重目标函数进行排序,选择最优解。这个最优解可能是一个从未预演过的、结合了侧向平移、急速爬升和姿态调整的复杂组合机动。随即,控制指令被发送到飞行器的执行机构(电机、舵面等)。
这个从感知到执行的完整决策闭环,可以用以下流程图进行概括:
为了更直观地展示这种代差级的优势,我们可以通过一个表格来对比在几种典型极端场景下,传统系统与生成式AI赋能系统的表现差异:
这个表格清晰地揭示了从“基于规则的反应”到“基于理解的生成”的根本性转变,这正是生成式AI对抗“墨菲定律”的核心武器。然而,正如任何强大的武器都伴随着风险,生成式AI的“创造力”也带来了一个幽灵般的、致命的挑战——AI幻觉。
三、核心挑战:驯服“AI幻觉”这匹致命的野马
%20拷贝.jpg)
将决策权赋予AI,尤其是在人命关天的航空领域,其可靠性与可验证性便成为核心挑战。其中,最致命的风险莫过于**“AI幻觉”(AI Hallucination)**。这里的幻觉并非指生成错误的文本,而是指AI模型在压力下,生成一个看似合理但物理上不可能、甚至会直接导致灾难的飞行指令。
正如AI可能在法律咨询中虚构判例,或在医疗诊断中给出错误建议,飞行控制领域的AI幻觉后果不堪设想。斯坦福大学《2025 AI信任指数报告》曾指出,在某些专业领域,AI的幻觉率超过18%,这个数字在航空领域是断然无法接受的“死刑判决”。
3.1 “幻觉”的根源:从数据到模型的系统性风险
AI幻觉的产生并非偶然,其根源深植于生成式AI的技术链路之中:
训练数据的“原罪”:模型学到的一切都源于数据。如果训练数据中包含错误信息、噪声、偏见,甚至是恶意注入的“污染”数据,模型就会忠实地学习这些“坏知识”,并在关键时刻“学以致用”。
模型的“泛化”与“幻想”:当模型遇到一个与训练数据分布差异极大的“域外”(Out-of-Distribution)场景时,它会尝试进行泛化。但如果泛化失败,它就可能开始“自由发挥”,即产生幻觉,捏造出一个看似符合模式但脱离现实的解决方案。
“黑箱”的诅咒:深度神经网络复杂的内部结构使其决策过程高度不透明。我们很难像审查传统代码一样,去理解它为何做出某个决策。这种不可解释性,使得我们难以在幻觉发生前预知和阻止它。
3.2 技术“缰绳”:多层次的幻觉抑制方案
幸运的是,我们并非束手无策。学术界和工业界正在构建一套多层次、纵深防御的“技术缰绳”,以驯服AI幻觉这匹野马。
3.2.1 检索增强生成(RAG):为创造力戴上“事实镣铐”
检索增强生成(Retrieval-Augmented Generation, RAG)是目前最有效的抑制幻觉的技术之一。其核心思想是,在AI生成决策之前,强制它先去一个可信的、权威的知识库中进行“检索”。
知识库构建:这个知识库包含了不容置疑的“地面实况”(Ground Truth),例如:
物理定律:牛顿力学、空气动力学公式等。
航空法规:禁飞区、高度限制、通信协议等。
飞行器性能包线:最大速度、最大过载、最小转弯半径等。
已验证的安全操作程序(SOP)。
工作流程:当AI面临决策时,它首先将当前情景转化为一个查询,在知识库中检索最相关的规则和数据。然后,它将这些检索到的“事实”作为生成决策的强约束条件。这确保了AI的“创造”不会脱离现实物理与规则的边界,极大地降低了生成危险指令的概率。
3.2.2 多模型协同验证:构建“决策陪审团”
这个策略借鉴了“三个臭皮匠,顶个诸葛亮”的智慧。系统内部署多个独立训练、甚至架构不同的AI决策模型,形成一个“决策陪审团”。
一致性投票:对于同一情景,所有模型同时生成决策方案。只有当多个模型的输出高度一致,或在一个预设的安全冗余范围内时,该决策才被采纳和执行。
分歧仲裁:如果模型间出现显著分歧,这本身就是一个强烈的“不确定性”信号。系统不会草率地选择任何一个方案,而是会立即启动预设的安全模式,如紧急悬停、返回起飞点(RTH)或将控制权交还给人类操作员。
3.2.3 可解释性与不确定性量化:给AI做“脑部扫描”
虽然我们无法完全打开“黑箱”,但可以开发工具来窥探其内部状态,评估其决策的“自信程度”。
不确定性量化:通过一些数学方法(如贝叶斯神经网络、模型集成等),可以计算出AI对其生成结果的不确定性得分。当这个得分超过预设阈值时,意味着AI自己也“没把握”,系统应拒绝执行该决策。
可解释性AI(XAI):利用诸如SHAP、LIME等技术,可以分析哪些输入特征对AI的最终决策贡献最大。这就像给AI做“脑部扫描”,绘制其内部计算节点的激活模式。这有助于我们理解其决策逻辑,发现潜在的偏见和异常。
3.2.4 严格的数据治理:从源头保证“思想纯洁”
这是最基础也是最重要的一环。垃圾进,垃圾出(Garbage In, Garbage Out)。必须建立一套严格的数据治理体系。
数据溯源与审查:对所有训练数据的来源、内容和标注过程进行严格的记录和审查。
建立语料黑名单:根据国家信息安全标准和行业规范,建立“污染”数据源黑名单。例如,规定单一来源的语料中,若包含的违法、不良或错误信息超过一个极低的阈值(如5%),则该来源将被永久禁用。
持续的数据清洗与增强:利用自动化工具和人工审核,持续地从数据集中剔除错误和偏见,并补充高质量的、覆盖边缘场景的数据。
通过这套组合拳,我们虽然无法100%根除AI幻觉,但可以将其发生的概率降低到可接受的、与传统系统相当甚至更低的水平,为AI的安全应用铺平道路。
四、前沿展望:“世界模型”驱动的终极具身智能
如果说当前的生成式AI是在“解决问题”,那么未来的终极形态——基于**“世界模型”(World Models)**的AI,则是在“理解世界”。一个搭载了世界模型的飞行器,其大脑中不仅仅有数据和模式,更有一个对物理世界动态的、可交互的、可预测的内部模拟。
4.1 “世界模型”:AI的“想象力”与“第六感”
“世界模型”的核心是让AI具备对时空因果的深层理解和预测能力。它通过学习海量的多模态数据(视频、文本、物理交互数据等),在自己的神经网络中构建一个微缩的、可运行的“虚拟世界”。
这意味着飞行器将拥有更高层次的认知能力:
物理常识与因果推理:它不再是简单地识别出“乌云”,而是能理解“乌云密布”意味着大气不稳定,可能在未来几分钟内产生强降雨和危险的下沉气流。它能推理出“地面湿滑”会影响紧急降落时的刹车距离。英伟达的Cosmos-Reason1等前沿模型,正在探索将AI的推理能力从语言扩展到现实物理世界,这正是构建世界模型的基础。
意图预测(Theory of Mind):通过观察地面行人、车辆,甚至其他飞行器的微小动态(如速度、加速度、朝向的细微变化),它能预测他们下一步的可能意图。例如,预测到一个孩子可能会突然冲向马路去追逐一个皮球,从而提前调整航线,预留出更大的安全裕度。
多智能体协同:在拥挤的空域中,它不再是简单地执行避让规则。它可以通过其内部的世界模型,模拟推演其他飞行器的可能行为和反应(“如果我向左,他可能会向右”),从而进行更高级的博弈和协商,实现如同经验丰富的人类飞行员编队一样高效、流畅的集群协同飞行。
4.2 具身智能与自主进化:从“经验执行者”到“规则重构者”
当生成式AI与飞行器这个“身体”(Embodiment)深度融合,它就成为了一个真正的**“具身智能体”(Embodied Agent)**。它不仅在虚拟世界中学习,更在与真实世界的每一次交互中持续进化。
自我优化:AI可以根据实际飞行中收集的数据,自主地微调其控制算法和决策模型,以更好地适应其所搭载的这架特定飞行器的性能特性。
规则重构:在漫长的运行中,AI甚至可能发现比人类工程师设计的更优的飞行策略或安全规则。它将从一个“经验的执行者”,转变为一个能够在新环境中“重构规则”的创造者。
最终,搭载世界模型的飞行器将成为一个真正意义上的智能生命体。它对世界的理解不再是割裂的数据点,而是一个连贯、动态、可预测的整体。这使得它能够从容应对“墨菲定律”带来的种种意外,在极端复杂的环境中,不仅能生存,更能高效、安全地完成任务,开启一个由AI定义的航空新时代。
五、结论:智能与熵增的永恒对决
%20拷贝.jpg)
生成式AI与“墨菲定律”的对决,本质上是智能与熵增、秩序与混乱的永恒较量。通过完成从“内容生成”到“决策生成”的深刻跃迁,生成式AI为飞行器在极端场景下的自主生存,提供了前所未有的强大武器。它用海量仿真数据武装先验知识,用多模态感知洞察瞬息万变的世界,在毫秒之间生成未曾预演的生命航线。
然而,要赢得这场对决,我们不仅需要不断提升AI的智能水平,更要为其戴上名为**“可信、可靠、可控”**的“紧箍咒”。我们必须正视并系统性地抑制“AI幻 giác”这一致命风险,通过检索增强生成、多模型验证、可解释性AI和严格的数据治理,构建起坚不可摧的安全防线。
展望未来,基于“世界模型”的具身智能将赋予飞行器深邃的物理理解和预判能力,使其成为真正意义上的“空中伙伴”。这场由生成式AI引领的航空革命,正以前所未有的深度和广度,重塑着技术、产业乃至我们与天空的关系。唯有以敬畏之心驾驭智能,以严谨之态守护安全,我们才能真正放心地将天空交给更智能的未来,迎来一个更加广阔、更加安全的航空新纪元。
📢💻 【省心锐评】
AI决策生成是飞行器智能化的“圣杯”,但通往圣杯之路,必须用安全、验证和法规的基石步步铺就。

评论