.png)
.png)
【摘要】特斯拉Robotaxi在奥斯汀首秀,标志着马斯克十年自动驾驶梦想的历史性落地。本文深度剖析Robotaxi的技术路线、商业模式、行业冲击与现实挑战,全面展望智能出行的未来变革。
引言
2025年6月22日,特斯拉Robotaxi在美国奥斯汀南部正式启动小范围测试。这一刻,不仅是马斯克“百万无人车队”构想的现实起点,更是全球智能出行产业的里程碑。十年磨一剑,从PPT到现实,特斯拉用Robotaxi向世界宣告:自动驾驶不再是遥远的梦想,而是触手可及的生活方式。本文将以技术论坛的视角,系统梳理Robotaxi的历史进程、技术路线、商业模式、行业影响与现实挑战,力求为读者呈现一份兼具深度与广度的智能出行全景图。
一、🚦十年“画饼”终成真:特斯拉Robotaxi历史性落地
%20拷贝-keyh.jpg)
1.1 里程碑时刻:从PPT到现实的关键跨越
1.1.1 “百万无人车队”构想的诞生与演进
2015年,马斯克首次提出“百万无人车队”设想,彼时自动驾驶尚处于技术萌芽期。特斯拉以FSD(Full Self-Driving)为核心,持续推进自动驾驶算法、硬件平台和数据闭环。期间,经历了多次技术瓶颈、法规障碍与量产跳票,外界一度质疑其“画饼”能力。然而,2025年6月,Robotaxi终于在奥斯汀南部落地,首批不到20辆2025款Model Y身披专属Robotaxi标识上路,成为自动驾驶商业化的标志性事件。
1.1.2 现实落地的三大关键因素
技术成熟:FSD纯视觉方案经过数亿公里实测,算法稳定性显著提升。
政策突破:得益于德克萨斯州对自动驾驶的开放政策,Robotaxi得以率先试点。
市场需求:共享出行与无人驾驶的结合,满足了城市交通降本增效的迫切需求。
1.2 首秀车型与运营框架:现阶段的“保守”与“激进”
1.2.1 车型选择与安全策略
首批车型:采用成熟的Model Y平台,保留基础驾驶硬件,部分车辆仍配备方向盘与安全员(注:实际运营中安全员为必备,后续将逐步过渡至无方向盘车型)。
未来车型:更具未来感的Cybercab(无方向盘、极简座舱)预计2026年登场,代表特斯拉对全无人驾驶的终极追求。
1.2.2 运营范围与规则
地理限制:服务区域限定在奥斯汀南部,采用电子围栏技术确保车辆不越界。
时间窗口:每日6:00-24:00运营,恶劣天气自动暂停服务。
安全保障:副驾驶标配人类安全员,后台24小时技术监控,三重安全防线。
1.2.3 “量产车型+有限场景”策略的意义
成本可控:利用现有量产车型,降低初期投入与试错成本。
技术验证:有限场景下积累真实路况数据,为后续大规模推广打下基础。
风险隔离:通过电子围栏与安全员,最大限度降低初期运营风险。
二、💰4.2美元颠覆行业:Robotaxi的“降维打击”清单
2.1 价格屠夫:4.2美元如何改写交通经济生态
2.1.1 价格对比与行业冲击
Robotaxi定价策略:4.2美元的定价已接近公交票价,远低于出租车和网约车,具备极强的价格竞争力。
行业影响:一旦规模化落地,Robotaxi有望实现“公交价格、专车体验”,对传统出租车、网约车乃至公交系统形成降维打击。
2.1.2 经济模型与未来展望
成本结构:纯视觉方案大幅降低硬件成本,算法迭代摊薄研发费用,运营成本趋近于电费+维护。
规模效应:2027年百万车队落地后,单车日均运营里程可达300公里,单位成本进一步下降。
就业冲击:全球3000万出租车司机岗位面临被替代风险,倒逼行业转型。
2.2 运营规则:安全底线与商业弹性的平衡
2.2.1 用户端规则
8岁以下儿童禁止单独乘车
导盲犬等服务型宠物允许上车
乘客需通过App实名认证与信用评估
2.2.2 安全保障体系
副驾驶标配人类安全员
后台24小时技术监控团队
车辆配备多重冗余硬件(摄像头、电池、制动系统)
2.2.3 车主端开放与共享经济新形态
所有特斯拉车主可通过OTA升级接入Robotaxi网络
车辆闲置时自动接单,收益分成
车主变“甩手掌柜”,汽车变“赚钱机器”
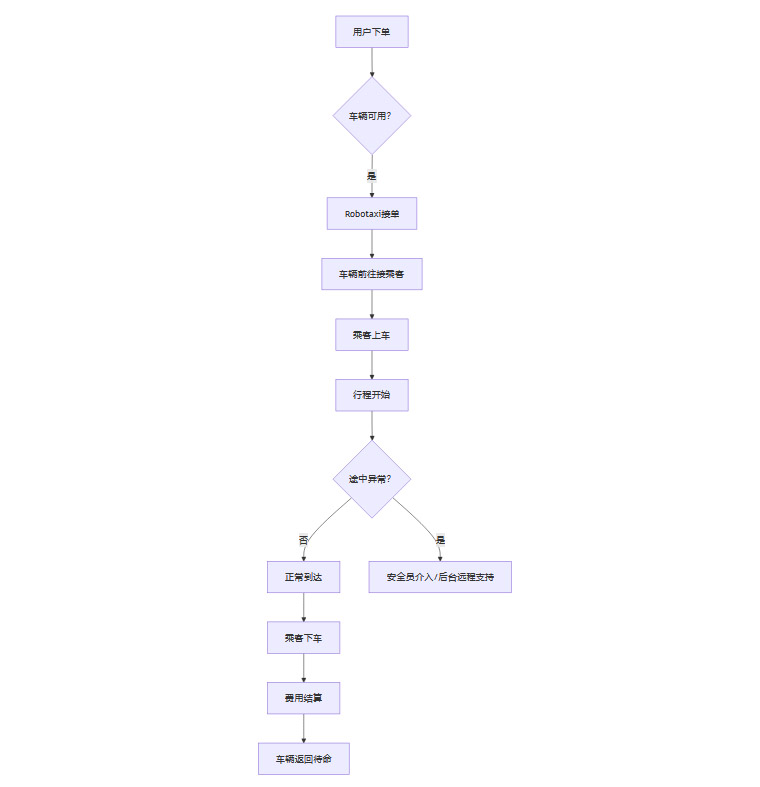
2.2.4 运营流程Mermaid流程图
三、🧠纯视觉“硬核”技术:马斯克的火星野心藏在代码里
%20拷贝-hwyr.jpg)
3.1 技术路线之争:纯视觉如何挑战行业“标配”
3.1.1 主流自动驾驶技术路线对比
特斯拉FSD:坚持纯视觉路线,依赖8颗摄像头+自研NPU芯片+神经网络算法,模拟人类老司机的感知与决策。
马斯克的“第一性原理”:去除昂贵传感器,依靠数据规模与算法迭代降低成本,目标是在没有高清地图的火星表面实现自动驾驶。
3.1.2 纯视觉方案的技术难点
极端天气下的感知能力:暴雨、强光、雾霾等环境对摄像头识别能力提出挑战。
动态障碍物识别:如何实时识别行人、自行车、动物等动态目标。
无高精地图场景下的定位与导航:依赖视觉SLAM与端到端神经网络。
3.2 华人工程师C位出镜:低调的技术攻坚团队
3.2.1 核心团队构成
段鹏飞:首席软件工程师,武汉理工大学本科,主导FSD核心算法与Fleet Learning系统。
AI团队:由硅谷与中国工程师联合组成,专注于神经网络、数据闭环与算法迭代。
3.2.2 Fleet Learning与Occupancy Network
Fleet Learning:百万辆量产车实时回传数据,日均千万次算法迭代,形成数据闭环。
Occupancy Network:2023年推出,赋予车辆“理解”动态空间关系的能力,为无安全员场景奠定基础。
3.2.3 技术迭代流程表
四、🌐从“车企”到“生态帝国”:特斯拉的万亿市值新支点
4.1 商业模式重构:车主变“甩手掌柜”,汽车变“赚钱机器”
4.1.1 Robotaxi网络的共享经济逻辑
车主端:通过App一键接入Robotaxi网络,车辆闲置时自动接单,收益覆盖车贷后仍有盈余。
平台端:特斯拉收取服务分成,形成持续现金流。
用户端:享受低价高效的出行服务,提升用车体验。
4.1.2 经济模型与市场预期
2027年百万车队规模:仅美国市场年营收有望突破200亿美元。
全球推广潜力:FSD系统可授权给其他品牌车辆,构建“硬件开源+软件收费”新商业闭环。
4.1.3 未来商业模式表
4.2 全球赋能计划:FSD或将成为汽车界的“安卓系统”
4.2.1 FSD授权与生态扩张
兼容性:未来所有符合硬件标准的车辆均可加装特斯拉传感器套件,接入FSD系统。
生态闭环:全球15亿辆存量汽车潜在升级空间,特斯拉有望成为“智能交通操作系统”供应商。
4.2.2 行业影响与变革
产业链重塑:传统车企被迫开放接口,软件定义汽车成为主流。
数据网络效应:每新增一辆FSD车辆,都会反哺算法进化,形成正反馈循环。
五、⚡争议与挑战:理想很丰满,现实有“荆棘”
%20拷贝.jpg)
5.1 技术落地的“灰度测试”
5.1.1 现实局限
当前Robotaxi测试仍依赖安全员与有限场景,纯视觉方案在极端环境下表现尚未完全达标。
2024年加州DMV数据显示,特斯拉自动驾驶系统每百万英里干预次数为0.8次,虽优于行业平均,但距离“零干预”仍有差距。
5.1.2 技术与安全的平衡
如何在保证技术激进性的同时,兼顾公众安全感与社会接受度,是特斯拉必须长期面对的课题。
5.2 监管与伦理的“双重考题”
5.2.1 全球法规差异
5.2.2 伦理与责任认定
事故责任归属、数据隐私保护、算法歧视等问题,考验着特斯拉的全球合规能力与社会责任。
结论
特斯拉Robotaxi的奥斯汀首秀,是自动驾驶产业十年磨砺的集大成者。它不仅以4.2美元的价格颠覆了传统出行经济,更以纯视觉技术路线挑战行业“标配”,推动汽车从交通工具向智能服务平台转型。尽管现实中仍有技术、法规与伦理的多重挑战,但Robotaxi的商业模式与生态扩张潜力,已为特斯拉打开了万亿市值的新支点。未来,随着技术迭代与政策松绑,Robotaxi有望成为全球智能出行的基础设施,真正实现“让每个人都能享受安全、便捷、低价的无人驾驶出行”。这场由马斯克引领的出行革命,才刚刚开始。
📢💻【省心锐评】
当 Robotaxi 真正普及,我们失去的会是方向盘,还是对未来的想象力?

评论