.png)
%20%E6%8B%B7%E8%B4%9D.jpg)

【摘要】eVTOL动力系统路线选择,是纯电理想与混动现实的博弈。在电池技术突破前,混合动力以续航优势成为商业化捷径,但也带来了设计与适航认证的复杂性。两种路线将长期并存,共同塑造低空经济的未来。
引言
城市的天际线,即将迎来新的轮廓。电动垂直起降飞行器(eVTOL)正从科幻走向现实,承诺着一种更安静、更高效、更绿色的城市空中交通(UAM)未来。在这场航空业的变革浪潮中,动力系统无疑是跳动最激烈、也最受瞩目的“心脏”。它不仅决定了飞行器的性能边界,更直接关系到成本控制、商业模式乃至最终能否拿到飞向天空的“通行证”——适航认证。
当前,一场关于这颗“心脏”动力来源的路线之争,正在全球eVTOL产业内悄然上演。一方是坚守纯电动的“原生心脏”,它代表着清洁与未来的终极形态。另一方则是采用混合动力的“心脏搭桥”,它试图通过嫁接成熟技术,为眼下的续航瓶颈提供务实的解决方案。这场争论并非简单的技术偏好,其背后是商业逻辑、安全哲学与工程现实的深度碰撞。本文将深入剖析这两大技术路线的利弊,探讨它们如何影响飞行器的整体设计,并重点分析其对复杂而严苛的适航认证过程带来的深远影响。
🚁 一、◆ 动力系统为何是eVTOL的心脏与价值高地
%20拷贝.jpg)
动力系统是eVTOL的绝对核心,其重要性贯穿了从研发设计到商业运营的全生命周期。它不仅是技术壁垒的制高点,也是产业价值链中最丰厚的一环。
1.1 动力系统的价值量与技术门槛
将动力系统称为eVTOL的“心脏”毫不为过。从成本构成来看,动力系统在整机成本中的占比高达约四成。这个系统是一个复杂的集合,远不止电机那么简单,它囊括了电机、电控、电池、高压配电、热管理、冗余架构以及至关重要的故障安全策略。
巨大的成本占比也意味着庞大的市场空间。根据行业测算,仅在中国市场,中期存量eVTOL的动力系统市场空间便有望达到千亿级别。放眼全球,这更是一个万亿级的蓝色海洋。对于城市空域运营而言,高出勤率和极高的安全等级是基本要求,而这一切的基石,正是动力系统的设计。它就是飞行器的“底盘”,决定了整机的可靠性与运营潜力。
1.2 功率密度对比与应用差异
eVTOL对动力系统的要求,尤其是对电机的要求,达到了前所未有的高度。如果说新能源汽车的电驱系统是在平地上赛跑,那么eVTOL的电驱系统则是在垂直攀岩。悬停与垂直起降阶段对瞬时功率的需求被压得更紧。
eVTOL电机 主流产品的功率密度普遍可以达到约八至九千瓦每千克。
乘用车电机 普遍的目标带也仅为五至六千瓦每千克。
这种性能上的代差,清晰地勾勒出eVTOL动力系统的技术挑战。它不仅需要更高的连续功率和更快的扭矩响应来保证飞行姿态的稳定,还需要更强大的冷却系统来应对持续高功率输出带来的热量。
1.3 关键指标一览
下表给出核心量化指标与工程含义,便于直观理解eVTOL动力系统的严苛要求。
1.4 任务剖面对功率的影响
eVTOL的典型任务剖面决定了其功率需求是动态且极端的。
垂直起降与悬停阶段 这是功率需求的峰值,所有动力单元需全功率或接近全功率工作,以克服重力。
过渡与巡航阶段 飞行器从垂直飞行转为水平飞行,功率需求会显著下降,此时的效率取决于飞行器的升阻比与推进效率。
频繁起降的航线 对于短途穿梭任务,频繁的起降循环对动力系统的热管理能力和电池的倍率寿命构成了显著冲击。
⚔️ 二、◆ 纯电推进与混合动力的对比
面对严苛的性能要求和商业化压力,eVTOL的动力系统演化出两条截然不同的技术路径。一条是纯粹的电动化,另一条则是油、电或氢、电结合的混合动力。
2.1 纯电推进 概览
纯电推进是当前全球eVTOL研发的主流选择,超过80%的机型都采用了这一方案。它以电池为唯一能源,驱动多个电机运行。
优点
结构简单 驱动链短,故障点少,有利于提升系统可靠性。
噪声低 电机运行极为安静,便于在噪声敏感的城市区域取得运营许可。
易于冗余 分布式电推进(DEP)架构可以轻松布置多个电机,实现自然的安全冗余。
维护经济 机械部件少,维护保养工作量和成本都显著降低。
难点
能量密度不足 这是最大的软肋,直接限制了航程与有效载荷。
热与寿命压力 高倍率运行对电池的热管理和循环寿命是巨大考验。
补能效率 充电网络尚在铺设阶段,充电时间长会影响飞机的周转效率和出勤率。
适配场景
城市内的短途通勤、低空旅游、紧急医疗转运等对航程要求不高的短途航线。
2.2 混合动力 概览
为了打破纯电路线的续航枷锁,混合动力方案应运而生。它通过引入能量密度更高的能源,为eVTOL提供更持久的动力。
架构
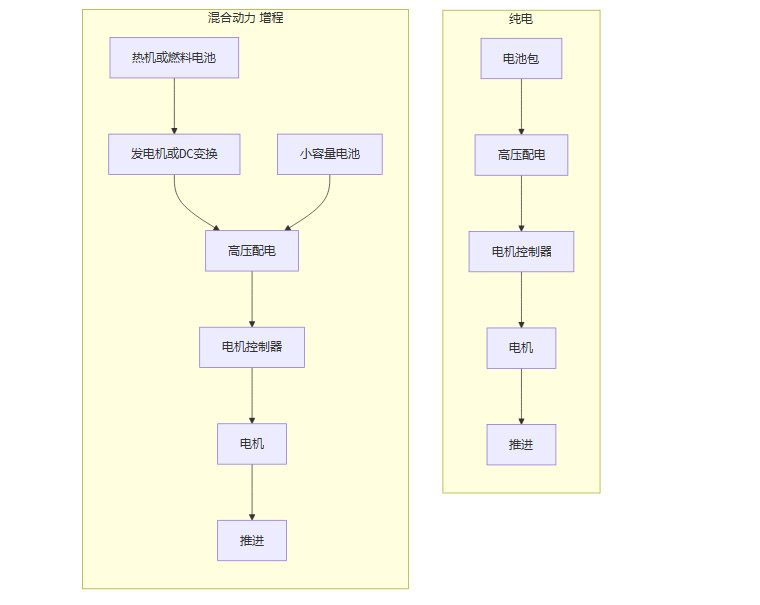
增程或串联 发动机或涡轮轴机带动发电机为电池充电或直接供电,热机不直接参与推进。
并联或混联 热机在特定阶段(如巡航)可以直接参与推进,同时为电池充电。
氢电混合 以氢燃料电池作为主要能源,电池包作为峰值功率补充和能量回收单元。
优点
载能密度高 燃油或氢能的能量密度远超电池,可将航程提升至数百公里。
补能快 加油或换氢的速度远快于充电,运营半径更大,周转效率更高。
双重冗余 天然提供“第二电源”,在电系统失效的极端工况下,容错空间更宽。
难点
系统复杂 集成热机、燃料系统、发电机等,重量和复杂度显著上升。
安全验证重 对热源、航油或储氢系统的安全隔离与防护,验证工作量巨大。
噪声与排放 发动机的噪声和排放可能受到未来城市政策的严格约束。
适配场景
城际通勤、中远程货运、以及对航时和可靠性要求极高的特殊任务与应急救援。
2.3 纯电与混动关键参数对照
2.4 运营经济性简表
📈 三、◆ 固态电池门槛与商业化路径
%20拷贝.jpg)
eVTOL的最终目标是实现大规模商业化运营。在这场竞赛中,动力路线的选择直接决定了谁能更快地越过商业化的“盈亏平衡点”。
3.1 门槛区间与现实进展
行业内有一个普遍共识,四百至五百瓦时每千克(400-500Wh/kg) 是eVTOL动力电池商用化的一个关键门槛。达到这个能量密度,意味着纯电eVTOL的航程可以稳定在200-300公里,从而真正打开城际交通的市场大门。
但现实是,目前航空级电芯的工程水平普遍在二百八十五至三百二十瓦时每千克(285-320Wh/kg)。如何在高能量密度的同时,保证高倍率放电能力和航空级的安全性,是当前落地的核心难点。尽管已有高比能新体系的电池样品发布,但距离稳定、可靠、成本可控的大规模产业化,还需要时间。
3.2 门槛前后的航程格局
电池能量密度的进展,将直接重塑纯电与混动的竞争格局。
3.3 路线选择的工程判据
在实际的机型开发中,选择哪条路线并非意气之争,而是基于一系列严谨的工程判据。
任务剖面 任务半径、载荷要求、起降频次、风场波动。
运营环境 噪声与排放的边界限制、地面周转时间要求。
项目约束 适航取证的周期、可用的资金窗口。
基础设施 充电、加油或加氢等基建的可获得性。
3.4 阶段性最优策略
基于以上判据,一个清晰的阶段性策略浮现出来。
门槛前(当前) 以混合动力托底,优先打通城际通勤与货运市场,快速产生现金流。同时,在城市短途场景,以纯电优先,其低噪声特性更容易拿到社区运营许可。
门槛后(未来) 当电池技术跨过门槛,纯电路线将快速扩展航线网络,成为主流。但混合动力仍将在长航线、重载荷和特种任务领域,固守其独特的竞争优势。
🦋 四、◆ 构型 气动 重量 热管理的系统影响
动力系统的选择,绝非一个孤立的技术决策。它像一只扇动翅膀的蝴蝶,其影响会层层传递,最终在飞行器的气动布局、重量控制、热管理乃至最关键的适航认证上,掀起巨大的波澜。
4.1 气动与推进布局的联动
纯电路线 更容易实现分布式推进,多个小而轻的电机可以灵活布置,这不仅有利于冗余设计和降噪,还能通过差动推力辅助飞行控制。因此,纯电方案与倾转旋翼、复合翼等高巡航效率的构型更加匹配。
混动路线 需要为热机、燃料电池、储油/储氢罐、复杂的进排气系统预留空间。这些部件对机身内部布置、重心管理、舱段通风和整机阻力管理都提出了更高的要求。
4.2 重量与能量分配
动力系统的不同,直接导致了全机重量预算的差异。
纯电eVTOL 电池包是最大的重量来源,整机重量分配都围绕电池包展开。设计师需要在航程、载荷和冗余电机数量之间做出艰难的平衡。
混动eVTOL 电池包可以显著缩小,但引入了热机、发电机、燃料系统等额外重量。其核心逻辑是用能量密度极高的燃料,来换回宝贵的任务半径和载荷能力。
下表给出一个简化的质量预算参考。
4.3 热管理的三热源协同
纯电系统 热管理相对简单,核心是处理好电池和电机的散热。高倍率放电下的电池温控策略,以及电机与电控的高效冷却结构,是设计的关键。
混动系统 热管理则是一曲复杂的“冰与火之歌”。系统中同时存在三个主要热源,“电池-电机/电控-热机/燃料电池堆”。必须做好热区隔离、可燃介质监测与泄放,并妥善处理发动机带来的噪声、振动与高温排气(NVH)问题,这些都直接影响乘客体验和城市许可。
4.4 能量与功率流向示意
4.5 控制与故障管理
纯电系统 依赖多通道容错控制算法。当有电机失效时,飞控系统能迅速重构控制律,通过调整其余电机的推力来实现减推力降级或安全可控着陆。
混动系统 新增了复杂的能源管理策略。如何控制热机的启停、功率跟随,以及在不同能源模式切换过程中的瞬态稳定性,是飞控与安全管理的核心要点。
📜 五、◆ 适航认证复杂度与路径
%20拷贝.jpg)
所有技术路线的先进性,最终都要在适航认证的“考场”上得到检验。动力系统的不同,直接决定了这张“考卷”的难度。
5.1 纯电的审查重点
纯电路线的适航认证路径相对清晰,但挑战高度集中。
电池安全 这是审查的核心。包括热失控的预防、发生后的传播抑制与隔离措施。
高倍率热工况 验证在极限起降工况下,电池系统的热管理能力。
系统级安全 证明分布式推进系统在部分失效后,飞行器依然水平可控。
EMC与高压安全 验证强电磁环境下的兼容性与高压系统的绝缘防护。
噪声评估 提供精确的噪声包络数据,以评估对社区的影响。
5.2 混合动力的叠加工作包
混合动力系统除了要满足纯电系统的所有要求外,还需面对一系列叠加的工作包。
燃料系统 进行详细的危害性分析,验证泄漏探测、防火防爆等措施。
发动机/燃料电池 证明其在航空环境下的可靠性、维护间隔和失效模式。
进排气系统 验证其在结冰、鸟撞等恶劣环境下的适应性与安全策略。
能源管理系统 验证其与飞控系统的集成,确保多源耦合下的功能安全。
故障树分析 整个故障树变得异常复杂,需要更全面的通告体系。
5.3 认证活动与里程碑
5.4 时间与资金窗口
纯电路线 路径相对清晰,取证的节奏更多受制于电池技术的成熟度和验证进度。
混动路线 前期的研发和认证工作量更大,但一旦取证,其在城际运营上能更快地产生正向现金流。对于资金窗口有限的团队,必须在项目初期就明确首款机型的认证路径与目标落地场景。
🏙️ 六、◆ 应用场景的选型与运营经济性
技术路线的选择最终要服务于商业场景。不同的场景需求,正牵引着eVTOL动力系统走向不同的发展方向。
6.1 核心场景与优先级
城市内短途客运 低噪声是第一要素,纯电占绝对优势。
城际通勤 航程和周转效率是关键,混动方案更稳妥。
中程货运与物流 载重、稳定性和补能效率至关重要,混动更合适。
应急救援 任务时效性和系统冗余性具有一票否决权,混动或氢电更具竞争力。
6.2 典型任务包线估算
6.3 成本与收益框架
无论是哪种路线,最终都要回归商业本质。
成本构成 主要包括购置成本、折旧、保险、能源费用(电费或油费)、维护成本(电池衰减或热机大修)、以及飞行员与航管等运营费用。
收益构成 主要来自每座公里或每吨公里的收入,以及通过提供时效性、定制化服务带来的溢价。
运营关键 出勤率和周转时间是决定盈利能力的核心。这背后是航线网络、地面站点布局和整机可靠性的综合体现。
6.4 噪声与公众接受度
噪声是eVTOL能否融入城市生活的关键。纯电方案在这方面具有天然优势,更容易达到社区可接受的阈值。混动方案则必须在进排气消音和桨叶声学优化上做大量的组合治理工作。起降场地的噪声包络,将直接决定其可运营的时段和频率。
🛠️ 七、◆ 供应链与工程抓手
%20拷贝.jpg)
面对复杂的路线选择和工程挑战,产业链需要明确核心的工程抓手。
7.1 电机与电控
重点在于高转速永磁同步电机方案,配合高效的碳化硅功率器件。同时,高导热绝缘材料、先进的绕组工艺,以及在震动、湿热、盐雾等恶劣环境下的可靠性,都是必须攻克的工程难点。
7.2 电池与高压系统
短中期内,技术路线将以高镍液态电池和半固态电池为主。长期则向能量密度更高的固态电池、硅基负极、预锂化等方向推进。与飞控深度联动的高压安全架构和BMS(电池管理系统)策略,是保证安全的核心。
7.3 热管理
无论是纯电还是混动,高效的热管理都是基础。集成式液冷或更先进的两相冷却技术是发展方向。对于混动系统,热区隔离和可燃介质监测是安全设计的重中之重。同时,所有热管理部件的维护可达性,必须在设计初期就充分考虑。
7.4 平台化与模块化
对于整机制造商而言,构建一个能够同时支持纯电和混动两种动力方案的平台化架构,是应对市场不确定性的最佳策略。通过能源模块的接口化和推进舱的标准化,不仅可以加速新机型的开发,还能在很大程度上复用认证成果,稳定供应链。
🔄 八、◆ 路线的融合与演进
8.1 阶段图景
短期 城市短途场景以纯电先行,抢占低噪声、零排放的政策与市场先机。
中期 城际通勤与货运市场以混动铺量,验证商业模式,形成规模效应。
长期 随着高比能电池与氢电技术的成熟,纯电的占比将大幅上升,而混动则会退守并深耕重载与超长距离的利基市场。
8.2 策略建议
对于产业参与者,策略应清晰明确。
以场景选路线,以路线定取证。
以体系抓工程,以数据做闭环。
强化飞测与运营一体化验证。
结论
动力系统的路线选择,关乎产业节奏,也关乎安全底线。纯电路线代表着更高的效率与更低的噪声,对城市空域更为友好。混合动力则在能量密度上拥有天然优势,任务半径更大,周转更快。
在电池能量密度跨越关键门槛之前,混合动力是实现大规模商业化、支撑城际通勤与中程货运稳定运营的更优路径。当门槛被跨越后,纯电路线将迅速扩展其网络,但混动在重载与远距市场仍有其不可替代的空间。
对工程团队来说,关键抓手很明确,高功率密度、多源热管理、系统冗余、适航可证,这四项要素必须同时达标,才能将技术优势转化为可量产、可运营的商业产品。对投资与供应链而言,平台化、模块化与合规化是支撑产业稳健发展的三根支柱,能让技术路线在并行中探索,也能让最终产品在市场中收敛。
技术是心脏,商业是血液,适航是骨架。三者合拍,这颗“飞行之心”才能跳得稳健而有力。
📢💻 【省心锐评】
纯电是面子,解决城市形象问题;混动是里子,解决赚钱的根本问题。在商言商,能飞得远、拉得动,才能活得久。技术路线没有对错,只有适不适合当下的生意。

评论