.png)
【摘要】5月25日,全球首个人形机器人格斗赛在杭州引爆科技圈。本文深度剖析赛事规则、技术底层、名场面与行业影响,探讨人形机器人格斗的技术突破、产业迁移与社会想象,全面展现“钢铁拳手”背后的创新密码与未来趋势。
引言
🤖⚡ 当机器人走进格斗场 —— 人类历史新时刻诞生
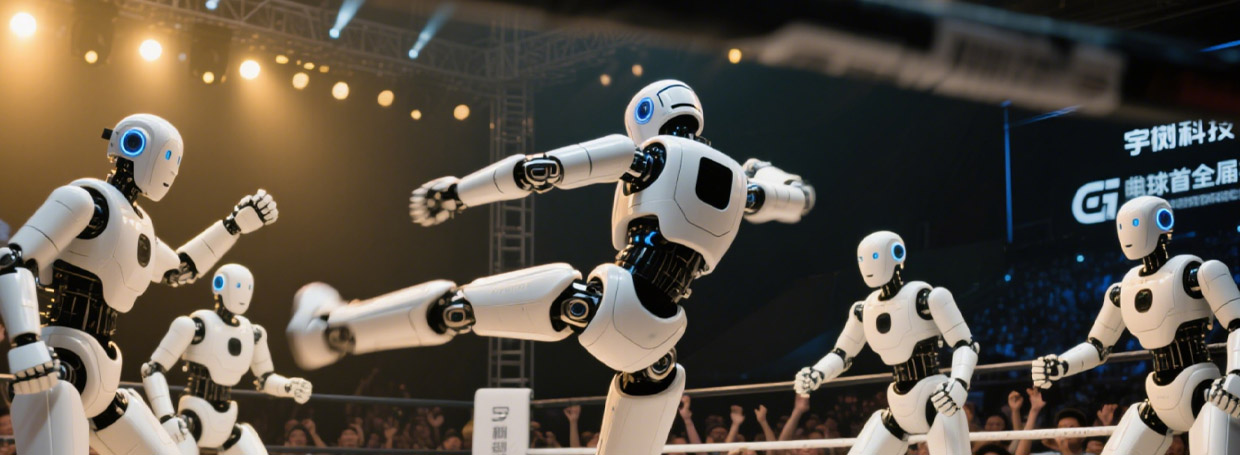
2024年5月25日,杭州成为全球科技爱好者的焦点。随着《CMG 世界机器人大赛・系列赛》上全球首个人形机器人格斗赛的圆满落幕,四台宇树科技G1机器人化身“钢铁拳手”,在擂台上展开了激烈的肉搏对决。最终,“AI测算师”小黑机器人凭借卓越表现摘得桂冠。宇树科技CEO王兴兴激动表示:“我们创造了人类历史新时刻!”这场赛事不仅是技术的较量,更是趣味与想象力的碰撞。本文将带你深度解读这场赛事的技术底牌、名场面、行业意义与未来展望,揭开人形机器人格斗的神秘面纱。
一、🎯 赛事规则全解析:拳脚生风,胜负如何量化?

1.1 量化对决:得分机制的科学设计
机器人格斗赛的最大看点之一,是如何将“拳脚相向”转化为可量化的胜负判定。赛事采用了如下得分机制:
此外,机器人支持手动遥控与语音控制的人机协同操作,既考验了操作员的反应,也为AI自主决策提供了试验场。
1.2 赛制流程:三回合制的竞技博弈
比赛流程分为表演赛与竞技赛两大部分:
表演赛:非参赛机器人展示基础动作。例如小紫机器人意外跌出拳台后“鲤鱼打挺”起身,成为遗憾错过的高能画面。
竞技赛:采用标准三回合制,每回合2分钟。四支队伍通过两轮淘汰决出决赛阵容,最终由小黑与小绿展开终极对决。
1.3 规则背后的技术考量
赛事规则不仅仅是“游戏规则”,更是对机器人硬件、软件、感知与决策系统的全方位压力测试。每一次倒地、每一次起身,都是对机器人动态平衡、关节扭矩、传感器延迟等技术指标的极限挑战。
二、🔥 名场面复盘:机器人格斗的“高能瞬间”与趣味细节
2.1 首轮战:小黑 VS 小粉 —— “绊跤式对决”的相爱相杀
首回合,双方以侧踢开局,却因定位失误上演“背靠背拥抱”名场面,小黑更因自绊倒地,好在5秒内迅速起身。第二回合,小粉开启“挑衅模式”,频繁挥拳施压,小黑则以防守反击周旋。决胜回合,小黑侧踢致小粉倒地,却因贴近缠斗再次自绊,最终凭起身速度优势拿下首胜。值得一提的是,直播中解说一度口误判小粉胜,后经更正,成为赛场趣闻。
2.2 次轮战:小绿 VS 小红 —— 狂暴输出与极速终结
首回合,小绿因激进进攻失误倒地。次回合化身“组合拳大师”,连续挥拳并附带转身拍屁股挑衅动作,极具娱乐性。第三回合,小绿仅用一记侧踢便“一秒KO”试图反击的小红,展现出压倒性腿法优势。
2.3 决赛:小黑 VS 小绿 —— 失误与策略的终极博弈
决赛前,外界期待小黑的“飓风冲撞”终极技能,但并未启用。对决中,小绿三次倒地却均在限时内起身,展现顽强抗冲击能力。小黑则凭借更少失误与精准腿法控制节奏,最终以积分优势登顶。赛后,小黑机身布满擦痕,成为鏖战的见证。
2.4 趣味名场面与网友热议
“机器人比我会打拳系列”
“建议下届让裁判也换成机器人”
“摔倒后鲤鱼打挺的速度比我爬起来还快”
这些名场面和网友评论,不仅让赛事充满看点,也引发了关于机器人未来的广泛讨论。
三、🛠️ 技术底牌大起底:35kg“钢铁拳手”如何玩转MMA?
%20拷贝.jpg)
3.1 硬件升级:抗揍身躯与灵活关节的平衡术
G1机器人身高130cm,体重35kg,虽轻于人类蝇量级选手,却拥有23个自由度关节,膝关节扭矩高达90N·m。其骨骼与关键结构件采用抗干扰材料,金属外壳虽在训练中留下“皮外伤”,但通过动态平衡补偿算法,能在倒地后自主站立。
3.2 软件赋能:AI学拳与实时决策的“人机共生”
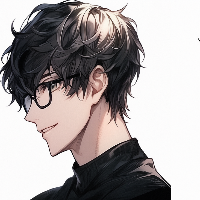
技术团队通过动作捕捉采集职业拳手数据,经AI强化学习生成8套基础格斗动作与组合技,使机器人具备直拳、勾拳、空中旋转踢等技能。实战中,感知系统实时定位对手并构建地图,决策系统结合操作员指令(遥控摇杆控制移动、按键组合触发招式)生成策略,毫秒级响应确保动作连贯性,堪称“3D版拳皇”实操现场。
3.3 感知与决策:从“遥控”到“自主”的进化
虽然目前机器人仍以人类遥控为主,但其感知系统已能实现对手位置、动作的实时捕捉,决策系统则在操作员指令基础上进行动作规划与优化。未来,随着AI自主化水平提升,机器人有望实现更高层次的自主格斗与策略博弈。
3.4 技术流程图:机器人格斗动作决策流程
四、🌐 行业影响与能力迁移:从格斗场到产业应用
4.1 格斗赛的“压力测试”价值
宇树科技CEO王兴兴将本次比赛视为“极端环境下的技术验证”。格斗场景对机器人抗冲击性、多模态感知与全身协调能力提出了极高要求。与马拉松等静态赛事相比,格斗的动态对抗更能暴露传感器延迟、动作规划偏差等问题,为后续算法优化提供了宝贵的真实数据。
4.2 技术迁移:从擂台到工业与救援
机器人在格斗中展现的快速平衡恢复、抗干扰控制等技术,具备广泛的产业迁移价值:
工业协作机器人:避障、动态抓取、复杂工况下的稳定作业
救援机器人:复杂地形适应、障碍物跨越、极端环境下的自我保护
医疗康复机器人:动态平衡训练、精准动作模仿
智能安防与巡检:应对突发冲击、灵活避险
4.3 技术能力迁移表
4.4 社会影响:点燃公众想象力与伦理思考
赛事不仅是技术秀,更点燃了公众对机器人产业的想象力。网友热议从技术惊叹延伸至伦理思考:
机器人是否会拥有“权利”?
AI自主化与人类控制的边界在哪里?
未来的人机协作会否超越电影《铁甲钢拳》?
五、🔬 技术深度剖析:人形机器人格斗的创新密码
%20拷贝.jpg)
5.1 运动控制与动力学:让“钢铁拳手”灵活如人
5.1.1 关节驱动与动力学建模
G1机器人之所以能完成侧踢、空翻、鲤鱼打挺等高难度动作,核心在于其高性能关节驱动系统与精确的动力学建模。每个关节均配备高扭矩伺服电机,结合多级减速器,既保证了动作的爆发力,也兼顾了动作的柔顺性。动力学建模则通过实时计算机器人各部位的受力与运动状态,实现动作的平滑过渡与能量高效利用。
5.1.2 动态平衡与姿态控制
格斗场景下,机器人需应对突发冲击、快速变向等复杂情况。G1采用多传感器融合的动态平衡系统,实时采集陀螺仪、加速度计、力传感器等数据,通过卡尔曼滤波等算法对姿态进行高频修正。倒地后,系统会自动判断最佳起身路径,协调全身关节完成“鲤鱼打挺”或侧身起立等动作,极大提升了实战中的生存能力。
5.1.3 运动控制流程表
5.2 感知系统:让机器人“看清”对手与环境
5.2.1 视觉与空间感知
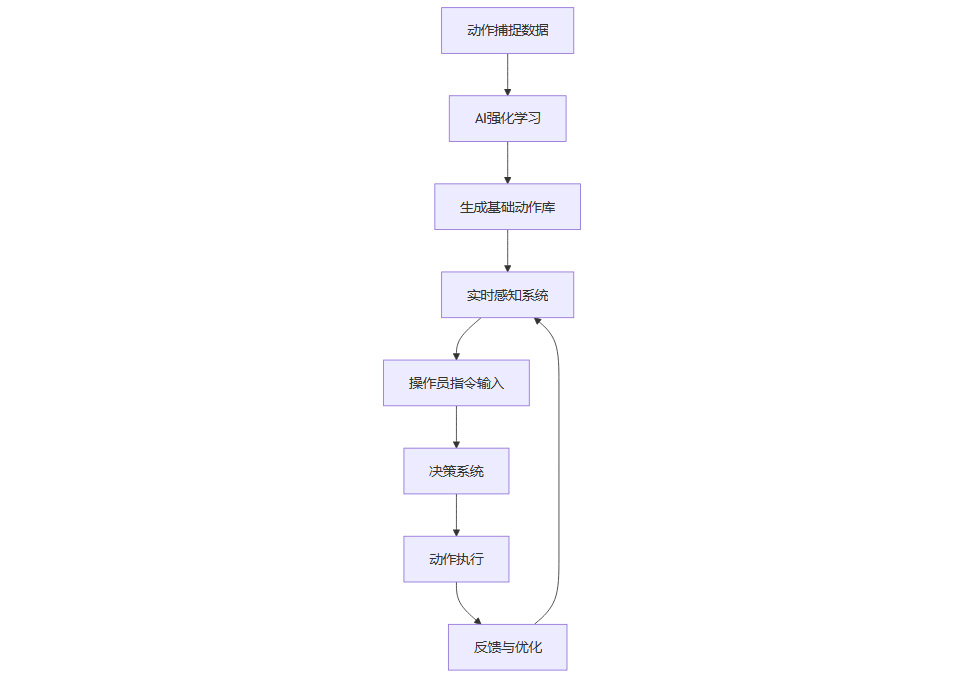
G1机器人配备多目摄像头与深度传感器,能够实时捕捉对手位置、动作轨迹及拳台边界。通过卷积神经网络(CNN)进行目标检测与动作识别,结合SLAM(同步定位与地图构建)技术,机器人可在动态环境中自主构建空间地图,预测对手下一步动作。
5.2.2 力觉与触觉反馈
格斗过程中,机器人手臂、腿部等关键部位内嵌力传感器,能够感知碰撞强度与接触点位置。系统根据力觉反馈动态调整动作力度与方向,既能规避无效攻击,也能防止自身受损。
5.2.3 感知系统架构图
5.3 AI决策与人机协同:格斗策略的“最强大脑”
5.3.1 强化学习与动作库生成
通过采集职业拳手的动作数据,AI系统采用深度强化学习算法,自动生成8套基础格斗动作与多种组合技。每套动作均经过数千次仿真与实战测试,确保在不同对抗情境下的有效性与安全性。
5.3.2 实时决策与策略优化
实战中,AI决策系统会根据感知数据、操作员指令与历史对抗经验,动态调整攻击、防守、闪避等策略。系统采用分层决策架构:底层负责动作执行与安全保护,中层进行战术选择,高层则根据比赛进程进行整体策略调整。
5.3.3 人机协同操作模式
目前,G1机器人支持两种操作模式:
手动遥控:操作员通过摇杆、按键组合控制机器人移动与出招,适合复杂战术与临场应变。
语音控制:操作员可通过语音指令触发特定动作,提升操作便捷性与人机互动体验。
未来,随着AI自主化水平提升,机器人有望实现全自主格斗,操作员仅需设定高层目标,具体动作由AI自主决策。
5.4 安全与容错:极端环境下的“自我保护”
5.4.1 结构防护与缓冲设计
G1机器人采用多层金属外壳与缓冲材料,关键部位如头部、躯干、关节均有专门的防护结构。即使在高强度碰撞下,也能有效吸收冲击能量,防止内部元件损坏。
5.4.2 容错机制与自我修复
系统内置多重容错机制:一旦检测到关节异常、传感器失灵或动作失控,系统会自动切换至安全模式,优先执行自我保护动作(如原地蹲伏、缓慢起身等),并通过远程诊断系统向操作员发出警报。
六、🌍 未来展望:人形机器人格斗的产业与社会影响
6.1 技术进化路线:从“遥控”到“自主”
6.1.1 现阶段:人机协同为主
目前,机器人格斗仍以人类遥控为主,AI主要负责动作规划与局部决策。操作员的战术素养与临场反应,直接影响比赛结果。
6.1.2 近期目标:半自主化格斗
随着感知、决策与控制技术的进步,未来机器人将实现半自主化格斗。AI可根据实时环境与对手动作,自动选择最优攻击或防守策略,操作员则负责高层战术与异常干预。
6.1.3 远期愿景:全自主智能格斗
最终目标是实现全自主智能格斗。机器人可自主感知、决策与执行,具备复杂战术博弈与自我学习能力,真正成为“钢铁拳皇”。
6.2 产业应用前景:格斗技术的多元迁移
6.2.1 工业与制造业
格斗机器人在动态平衡、抗冲击、动作规划等方面的技术积累,可直接迁移至工业机器人领域,提升其在复杂工况下的适应性与安全性。
6.2.2 公共安全与救援
在地震、火灾等极端环境下,具备高机动性与自我保护能力的机器人可承担搜救、搬运、障碍清除等任务,极大提升救援效率与安全性。
6.2.3 医疗与康复
机器人精准的动作控制与动态平衡能力,可应用于康复训练、辅助行走等医疗场景,为患者提供个性化、智能化的康复方案。
6.2.4 教育与娱乐
格斗机器人赛事本身就是极佳的科普与娱乐载体。通过赛事推广,激发青少年对机器人、AI等前沿科技的兴趣,推动STEM教育发展。
6.3 社会与伦理:人机边界的再定义
6.3.1 公众想象力的释放
赛事引发的网友热议,反映了公众对机器人未来的无限想象。从“机器人比我会打拳”到“让裁判也换成机器人”,人们对人机协作、AI自主化充满期待。
6.3.2 伦理与权利的讨论
随着机器人能力提升,关于其“权利”、自主性与人类控制边界的讨论日益增多。如何在保障人类主导权的前提下,合理赋予机器人自主决策空间,成为亟需思考的问题。
6.3.3 未来社会的融合图景
机器人格斗不仅是技术突破,更是社会认知与伦理边界的探索。未来,人机协作有望在更多领域实现深度融合,共同推动社会进步。
七、📝 结论:钢铁拳手,未来已来
全球首个人形机器人格斗赛的成功举办,标志着人形机器人技术迈入全新阶段。赛事不仅展示了机器人在动态平衡、动作规划、感知决策等方面的突破,也为产业应用、社会认知与伦理思考提供了丰富的现实样本。随着技术的不断进化,未来的“钢铁拳手”将不仅仅是格斗场上的明星,更将在工业、救援、医疗、教育等领域大放异彩。人机协作的新时代,已然开启。
📢💻 【省心锐评】
随着软硬件协同升级,这些 “钢铁拳手” 未来或将走进工业产线、救援现场甚至家庭服务,让科技的温度融入更多场景。

评论