.png)


【摘要】聚焦eVTOL在城市低空运行中与鸟类碰撞的突出风险,系统阐述了从地面多模态监测预警、机载AI自主规避到优化构型设计的“空天地”一体化解决方案,旨在构建安全和谐的城市空中交通。
引言
低空经济的浪潮正以前所未有的势头席卷而来。随着政策的东风,以电动垂直起降飞行器(eVTOL)为代表的“空中出租车”正从科幻电影步入现实,预示着一场城市交通的深刻变革。它们安静、环保、高效,承诺将我们从拥堵的地面解放出来,在鳞次栉比的“城市峡谷”中开辟出新的出行维度。
然而,当我们抬头仰望这片即将繁忙起来的天空时,一个不容忽视的问题浮出水面。这片天空并非空无一物,它是无数鸟类世代栖息的家园。当高速旋转的旋翼与振翅飞翔的生命在狭窄的低空相遇,一场“致命邂逅”的风险便悄然而至。鸟击,这个在传统航空领域令人闻之色变的词汇,对于结构更轻、飞行高度更低的eVTOL而言,其威胁性被急剧放大。
这不仅是一个技术挑战,更关乎公共安全与生态和谐。我们能否在享受空中交通便利的同时,保护好这些天空的原住民?本文将深入剖析eVTOL面临的鸟击风险,并系统性地探讨一套从地面到空中、从监测到规避、从软件到硬件的综合性解决方案。我们将一同探寻,如何通过技术的力量,为这场不可避免的“邂逅”找到一个安全的出口,共同构建一个真正高效、安全且和谐的“天空之城”。
一、风险剖析:当“空中出租车”闯入天空原住民的家园
%20拷贝.jpg)
eVTOL面临的鸟击风险并非传统航空风险的简单平移,而是在特定场景下被显著放大的新挑战。其风险的突出性,源于飞行模式与结构特性的双重叠加。这并非危言耸听,现实中的案例已经为我们敲响了警钟。
1.1 典型案例警示
城市低空飞行器与鸟类的碰撞已不是理论上的风险,而是频发的现实事件。梳理近年来的部分案例,可以直观地感受到这一威胁的真实性。
表1:国内外部分低空飞行器鸟击典型案例
这些案例清晰地表明,鸟击事件在城市低空环境中频发,对飞行器的安全和正常运营构成了直接且严重的威胁。尤其值得注意的是,伦敦的案例凸显了涵道风扇构型在物理防护上的巨大优势,而采用开放式旋翼的飞行器则普遍表现得更为脆弱。
1.2 无法回避的空域重叠
风险的根源,在于eVTOL的运行空域与鸟类的主要活动区域发生了高度重合。
eVTOL的设计初衷是服务于城市内的点对点交通,其典型运行高度通常在300米以下的超低空,部分城际航线可能会爬升至1000米。而这片空域,恰恰是绝大多数城市鸟类活动最频繁的“家园”。无论是觅食、迁徙还是日常飞行,鸟类的身影密集分布于此。
更进一步,现代城市高楼林立的“城市峡谷”环境,以及其间点缀的公园、绿地和水体,无意中为鸟类创造了大量的栖息地和“飞行走廊”。这些区域吸引了大量鸟类聚集,使得eVTOL在起降场和关键航路周边遭遇鸟群的概率远高于开阔地带。
表2:eVTOL与传统民航客机飞行剖面对比
1.3 碰撞的物理学:脆弱结构面临的巨大冲击
如果说空域重合是增加了“相遇”的概率,那么eVTOL自身的结构特性则放大了“碰撞”的后果。
我们不能低估一次看似微不足道的鸟击所蕴含的破坏力。根据动量定理,撞击力与物体的质量和速度的平方成正比。一个看似不起眼的例子足以说明问题,一只体重仅0.5公斤的鸟,在与时速200公里的飞行器碰撞时,可瞬间产生高达数吨的冲击力。这种力量足以洞穿机体,或对关键部件造成毁灭性打击。
传统航空发动机在设计之初就将抗鸟击能力作为核心指标。但是,eVTOL的设计哲学完全不同。为了实现垂直起降和高效率悬停,它必须追求极致的轻量化。这导致其动力系统普遍采用分布式电推进和碳纤维等轻质复合材料制造的旋翼。这种材料虽然强度高,但其韧性和抗冲击能力远不及金属材料,面对鸟击时极易损坏。
表3:eVTOL旋翼与传统航空发动机抗鸟击能力对比
1.4 风险的量化:高昂的经济与运营代价
鸟击风险不仅是安全问题,也带来了直接且高昂的经济代价。每一次碰撞,无论后果大小,都会引发一系列连锁反应,其经济影响远超想象。
表4:鸟击事件相关经济影响估算
可以看出,鸟击风险已成为城市低空经济发展中一个不容忽视的重要制约因素。随着未来eVTOL和无人机进入规模化运营阶段,如何有效进行风险管理和控制经济损失,将成为所有运营商必须面对的核心课题。任何一次严重事故都可能对整个行业的公众信任度造成沉重打击。
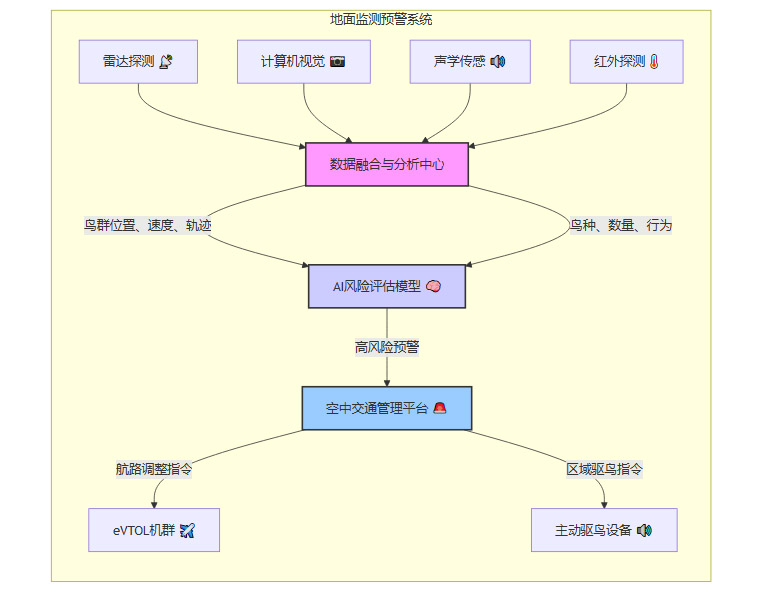
二、地面“天网”:构建多模态融合的区域监测预警系统
面对无处不在的鸟击风险,单纯依靠飞行器自身规避是远远不够的。在垂直起降场和关键航路周边,构建一套区域性、立体化的鸟类活动监测预警系统,就如同为城市低空织起一张智能的“天网”,是实现主动防御、从源头降低风险的基石。
2.1 系统的核心理念:从被动防御到主动预知
传统机场的驱鸟手段多以被动防御为主,效率有限且治标不治本。现代化的监测预警系统,其核心理念在于从“被动驱赶”转向“主动预知”。它旨在通过先进的传感技术和AI算法,实时掌握责任空域内鸟类的动态,实现“看得见、看得清、看得懂、能预警”的目标。
2.2 理解监测目标:破译鸟类活动的“时空密码”
要构建有效的监测系统,首先必须破译城市鸟类的“作息密码”。它们的活动并非随机,而是遵循着明显的时空规律。掌握这些规律,是实现精准预测和高效预警的前提。
城市鸟类的活动强度在一天中的不同时段呈现明显的高峰和低谷。
表5:城市鸟类日活动规律与风险等级
同样,季节变化,特别是候鸟的迁徙,也会导致风险等级的剧烈波动。
表6:鸟类季节性活动规律与风险等级
这些规律为我们指明了重点监控的时段和季节,使得监测资源的投入更具针对性。
2.3 关键技术模块详解
这张“天网”由多种先进技术协同工作,各司其职,共同构成一个强大的感知网络。
2.3.1 雷达探测:全天候的“千里眼”
雷达是这套系统的骨干,能够全天候、远距离地工作,是大范围空域监控的理想选择。专用的“探鸟雷达”可以精确计算出鸟群的位置、高度、速度、飞行方向和数量规模。
2.3.2 声学传感:聆听天空的“顺风耳”
声学传感器通过采集和分析鸟鸣声,能够准确识别出不同鸟类的种类,并能在夜间、大雾或植被遮挡等视觉受限的条件下有效工作。
2.3.3 计算机视觉与AI:智能化的“火眼金睛”
通过部署高清摄像头和AI视觉识别算法,可以实现对鸟类的精准识别、轨迹追踪和动态热力图生成。国内如青岛机场和天津七里海湿地的应用案例已证明,该技术能将预警响应时间缩短至秒级。
2.4 多模态数据融合:1+1+1 > 3 的智慧
任何单一的传感器都有其局限性。将雷达、红外、视觉、声学等多源数据进行多模态融合,取长补短,是构建顶级预警系统的必然选择,能够显著提升在复杂环境下的识别准确率和预警可靠性。
2.5 风险预测与动态航路调整
地面系统的最终目的,是基于海量数据进行风险预测,并指导实际运营进行动态调整。
基于历史监测数据和AI预测模型,系统可以对城市低空的鸟类活动风险进行实时评估和短时预测。其工作流程如下:
数据采集:多模态传感器网络实时采集空域内的鸟类活动数据。
风险分析:AI模型结合历史数据与实时数据,分析鸟类活动规律,生成可视化的风险热力图,并预测未来1-2小时内的高风险区域和时段。
预警推送:系统自动将高风险预警信息推送至eVTOL机载系统和空中交通管制中心。
动态决策:管制中心或自动化系统根据预警,动态调整飞行器的航路、飞行高度或起降窗口,主动规避高风险区域。
表7:基于风险预测的航路动态调整示意
这种基于数据驱动的动态管理模式,可将鸟击碰撞概率降低高达85%,是实现精细化、智能化空域管理的关键。
三、机载“智慧之眼”:赋予eVTOL自主规避的生存本能
%20拷贝.jpg)
地面预警系统构筑了第一道防线,但它无法应对突发情况。因此,让eVTOL自身具备实时探测和自主规避的能力,是保障飞行安全的最后,也是最关键的一道屏障。这相当于为每一架eVTOL安装上了一双“智慧之眼”和一颗反应迅速的“小脑”。
3.1 主动规避的必要性
机载自主规避系统的核心价值在于即时性和自主性。当鸟群突然从建筑物后方出现,只有依靠机载系统才能在千钧一发之际化解危机。这种从被动接收指令到主动感知决策的转变,是eVTOL在复杂动态的城市环境中安全生存的核心能力。
3.2 技术架构拆解
一套成熟的机载自主规避系统,通常由感知、决策和执行三个核心部分构成。
3.2.1 多传感器融合感知
通过集成摄像头、激光雷达(LiDAR)、毫米波雷达等多种传感器,eVTOL能够实现对前方最远2公里范围内鸟类等障碍物的实时探测,并将多源数据融合,生成一个关于周围环境的、统一而精确的数字模型。
3.2.2 AI决策大脑
机载的“AI决策大脑”利用轻量化的深度学习模型,在毫秒级时间内识别出鸟类目标。一旦确认存在碰撞风险,决策算法会立即在500毫秒内计算出多条安全的备选规避路径,并优先选择对飞行姿态影响最小的侧向水平偏移策略。
3.2.3 飞控系统执行
决策大脑选定规避路径后,会立即生成控制指令,由飞行控制系统精确地引导eVTOL平稳、精准地执行规避动作,自主绕开鸟群。
3.3 规避策略的艺术
自主规避需要与低空交通管理系统(UTM)保持实时通信,实现多机协同避障。同时,智慧座舱会通过语音或视觉向乘客发出预警,提升乘坐体验。未来的系统还可能集成声学AI,辅助判断鸟群动向。
四、构型设计的源头治理:打造天生更安全的飞行器
软件层面的监测预警和自主规避是重要的“补丁”,但要从根本上提升eVTOL的安全性,必须回到设计的源头——飞行器的构型。
4.1 主流构型的“阿喀琉斯之踵”
目前主流的多旋翼、复合翼和倾转旋翼构型,普遍存在开放式旋翼的弱点,即旋翼直接暴露在外,面对鸟击时物理防护能力差,极易受损。
4.2 涵道风扇:自带“金钟罩”的潜力股
与之相对,涵道风扇(Ducted Fan)设计因其独特的结构,在防鸟击方面展现出无与伦比的潜力。环形的涵道为旋转的叶片提供了一道坚固的物理屏障,能够有效抵御鸟类等外物的直接撞击。如前文案例所示,其防护效果在实际应用中已得到验证。
除了防鸟击,涵道风扇还具有气动噪声更低、地面安全性更高等一系列优点,使其成为未来城市空中交通极具吸引力的选择。尽管存在重量和成本等挑战,但其内在的安全性优势,使其应用前景愈发广阔。
表8:不同eVTOL构型防鸟击能力综合评估
4.3 多构型融合的未来
未来的eVTOL设计,可能会走向多构型融合的道路,在飞行的不同阶段发挥不同构型的优势,以平衡安全、性能与经济性。
五、总结与展望:构建人与自然和谐共生的天空
%20拷贝.jpg)
城市峡谷中的“致命邂逅”,是低空经济迈向成熟过程中必须跨越的一道坎。它考验着我们平衡发展与生态、效率与安全的智慧。唯有构建一个系统性的、多层次的综合防御体系,方能为城市空中交通的长远发展保驾护航。
回顾全文,我们勾勒出了一幅“空天地”一体化的解决方案蓝图:
在地面端,我们依赖由雷达、视觉、声学等技术融合而成的智能监测预警“天网”,实现对鸟类活动的宏观掌控和提前预警。
在飞行器端,我们为eVTOL装上由多传感器和AI算法驱动的自主规避“智慧之眼”,赋予其在微观层面应对突发风险的生存本能。
在设计制造端,我们倡导从源头治理,优先考虑如涵道风扇这样具备内在物理防护能力的优化构型,打造天生更安全的飞行器。
这三个层面环环相扣,缺一不可。除此之外,完善的低空交通管理(UTM)与空域协同机制,以及严格的适航标准和安全评估体系,则是将这一切技术手段有效整合并落地执行的制度保障。
展望未来,随着人工智能、先进传感器和新材料技术的不断突破,我们有理由相信,eVTOL与鸟类的碰撞风险将得到更有效的控制。我们追求的,是一个飞行器能够智能地绕开鸟群,一个交通网络能够主动地避让迁徙路线,一个人类活动能够与自然生态完美共存的未来。当那一天到来,穿梭于城市峡谷中的将不再是带来“致命邂逅”的风险,而是真正承载着希望与便捷的“空中精灵”。
📢💻 【省心锐评】
eVTOL的安全,始于设计,成于感知,终于协同。鸟击风险是块硬骨头,啃下它,低空经济的天空才能真正晴朗。

评论