.png)


【摘要】聚焦eVTOL飞行员培养的行业瓶颈,深度剖析其独特技能要求、全新训练体系构建,以及相应的法规认证框架,为低空经济商业化落地提供人才解决方案。
引言
电动垂直起降飞行器(eVTOL)正从概念验证走向商业化前夜。行业普遍将目光投向2025年,视其为规模化运营的元年。然而,在先进的飞行器、智能的调度系统和宏大的城市空中交通(UAM)蓝图之下,一个基础却极为棘手的问题浮出水面,那就是“人”的因素。具体来说,是如何快速、合规、且高质量地培养出能够驾驭这种全新物种的飞行员。
这并非简单的存量飞行员转岗问题。eVTOL在飞行原理、动力系统、自动化程度上都与传统固定翼飞机或直升机存在代际差异。传统的训练模式与知识体系在此几乎失效,直接导致了供给侧与能力侧的双重挑战。如果飞行员的培养效率无法匹配机队的增长速度,整个低空经济生态将面临“有路无车、有车无司机”的系统性风险。因此,构建一套专为eVTOL设计的机型别类等级(Type Rating)训练与认证体系,已不再是锦上添花的选项,而是决定其商业化成败的关键基础设施。本文将从行业瓶颈出发,系统拆解eVTOL飞行员的能力模型、训练体系设计,并探讨其背后的法规认证逻辑。
✈️ 一、行业困局:飞行员供给与能力模型的双重错配
%20拷贝-gurt.jpg)
eVTOL商业化落地面临的第一个现实障碍,是合格飞行员的供给缺口。这个缺口并非单一的数量问题,而是数量与质量交织的结构性难题。
1.1 供给侧瓶颈:指数级需求与线性培养的矛盾
eVTOL产业的增长曲线是指数级的。随着国内外多家头部企业机型进入型号合格证(TC)的冲刺阶段,未来几年内,全球eVTOL机队规模将从两位数迅速扩张至四位数甚至更高。每一架投入商业运营的eVTOL都需要配备相应数量的飞行员,考虑到轮班、备份和培训需求,人机比远高于1:1。
这种井喷式的需求,与传统航空业线性的、长周期的飞行员培养模式形成了尖锐冲突。传统航线飞行员的培养动辄需要数年时间与高昂的资金投入。若将此模式直接套用在eVTOL上,其训练周期和成本将严重拖累商业化进程。飞行员的供给速度,已成为限制eVTOL市场扩张的最直接的速率限制器。
1.2 能力侧挑战:传统经验的失效与新技能栈的缺位
更深层次的问题在于能力模型的错配。eVTOL并非简单的“电动直升机”或“能垂直起降的固定翼飞机”。它是一种全新的航空器品类,其技术特性决定了飞行员必须具备一个全新的、复合型的技能栈。
传统飞行员的经验和肌肉记忆,在eVTOL上可能不仅无用,甚至有害。例如,固定翼飞行员习惯于通过空速和姿态管理能量,而直升机飞行员则精通于总距、桨距的协同操作。这些经验在eVTOL的电传飞控和自动化系统面前,需要被彻底重构。飞行员的角色从一个直接的“操控者”,转变为一个高度自动化系统下的“管理者”和“监控者”。这种角色转变,对飞行员的系统知识、认知能力和决策逻辑提出了截然不同的要求,形成了一个新的人才瓶颈。
⚙️ 二、能力重构:eVTOL飞行员的新技术栈画像
要解决能力错配问题,首先必须清晰定义eVTOL飞行员到底需要具备哪些核心能力。这套能力模型是后续训练大纲和认证标准的基础。它不再是单一维度的驾驶技术,而是一个涵盖飞行技能、系统认知和人机交互的立体化技术栈。
2.1 核心飞行技能:跨模态操控与系统管理
这是eVTOL飞行员最基础、也最具特色的技能要求,直接源于其独特的飞行器设计。
2.1.1 飞行模式的无缝切换
eVTOL最典型的飞行剖面包含垂直起降、悬停、过渡飞行和水平巡航等多个阶段。尤其是在从垂直升力模式(通常由多个旋翼提供升力)向水平巡航模式(由机翼提供升力)的过渡阶段,飞行器的气动特性、控制逻辑和能量消耗都会发生剧烈变化。
飞行员必须深刻理解这一过程中的控制律转换机制。他需要监控的不是单一的舵面或桨距,而是整个自动化系统是否在预设的“包线”内安全、平稳地完成模态切换。同时,他必须具备在过渡阶段出现异常(如部分电机失效、姿态异常)时,迅速判断并接管操控,将飞行器带回安全状态的能力。这种“模态监护”和“自动化接管”能力,是传统飞行员未曾面对过的全新考验。
2.1.2 分布式电推进与能源管理
eVTOL普遍采用分布式电力推进(DEP)系统,即由多个独立的电机驱动多个旋翼或风扇。这带来了极高的安全冗余,也给飞行员带来了新的管理任务。
多电机系统管理:飞行员需要监控数十个电机的运行状态,理解在单个或多个电机失效时,飞控系统如何自动重构控制力矩,以及在这种非对称推力下飞机的性能边界会如何变化。
高压电池能量管理:电池是eVTOL的“心脏”。飞行员必须成为一名出色的“电量管家”。他需要实时监控电池的荷电状态(SoC)、健康状态(SoH)、温度和放电功率,并根据任务剖面(如高功率的起降阶段和低功率的巡航阶段)做出精准的能量规划。更重要的是,他必须掌握电池热失控等极端故障的识别与处置预案。
下表对比了传统航空器与eVTOL在动力系统管理上的核心差异。
2.2 认知与决策能力:城市复杂环境下的系统监护
由于eVTOL高度自动化,飞行员的大部分精力将从“手脚协调”的操控任务中解放出来,转向更高阶的认知与决策任务。
2.2.1 自动化陷阱识别与手动接管
“自动化依赖”和“自动化惊奇”是高度自动化系统中的典型人因风险。飞行员必须时刻保持对飞行器状态的精准感知(Situation Awareness),理解自动化系统正在做什么、将要做什么,以及它的能力边界在哪里。
当自动化系统因传感器数据错误、软件逻辑缺陷或超出设计工作范围而做出不符合预期的行为时,飞行员需要能够在极短时间内识别出“自动化陷阱”,并果断地断开自动化,实施手动接管。这种能力需要通过大量针对性的情景训练来培养,远比单纯的程序化操作更为复杂。
2.2.2 复杂城市环境下的情景化决策
eVTOL的主要运行场景是城市低空。这意味着飞行员将面临传统航空极少遇到的复杂环境挑战。
高密度运行:与成百上千架eVTOL、无人机共享狭小的空域,需要极强的协同飞行与间隔保持能力。
特殊气象:城市“热岛效应”和“峡谷风”等微气象,对飞行器的性能和操控产生直接影响。
信号遮挡:高楼林立可能导致GNSS信号丢失或多径效应,数据链也可能出现波动。飞行员需要掌握在导航或通信降级模式下的飞行能力。
面对这些动态变化的复杂情景,飞行员需要具备强大的情景化决策能力,能够快速评估风险、调用预案、并做出最优选择。
2.3 人机交互能力:深度HMI理解与认知负荷管理
eVTOL的驾驶舱通常采用高度集成化的玻璃座舱和人机交互界面(HMI)。飞行员与飞机的主要沟通渠道就是这几块屏幕。因此,对HMI的深度理解至关重要。
信息架构理解:飞行员需要熟悉HMI的信息分层逻辑,知道在不同飞行阶段和紧急情况下,去哪里快速获取关键信息。
告警管理:面对复杂的声光电告警,飞行员需要能够快速过滤次要信息,抓住主要矛盾,避免被“告警风暴”淹没而导致决策瘫痪。
模式感知:必须清晰地知道当前飞机处于何种自动化模式、导航模式或飞行控制模式,避免因模式混淆而导致操控失误。
优秀的eVTOL飞行员,必须是一个善于管理自身认知负荷的专家,能够在高压环境下,通过高效的人机交互,始终保持清晰的态势感知。
🏗️ 三、训练体系设计:从知识灌输到能力生成的闭环
%20拷贝-lfbz.jpg)
基于上述能力模型,一套全新的eVTOL机型别类等级训练体系必须被建立起来。其核心思想应从传统的“课时驱动”转向“能力驱动”,即采用**能力本位训练与评估(CBTA)**的理念。训练的最终目的不是完成多少小时的飞行,而是确保学员真正掌握了应对真实运行场景所需的各项能力。
3.1 训练架构总览:能力本位的顶层设计
整个训练体系应构成一个从理论到实践,再到持续优化的闭环。我们可以用一个流程图来表示其核心架构。
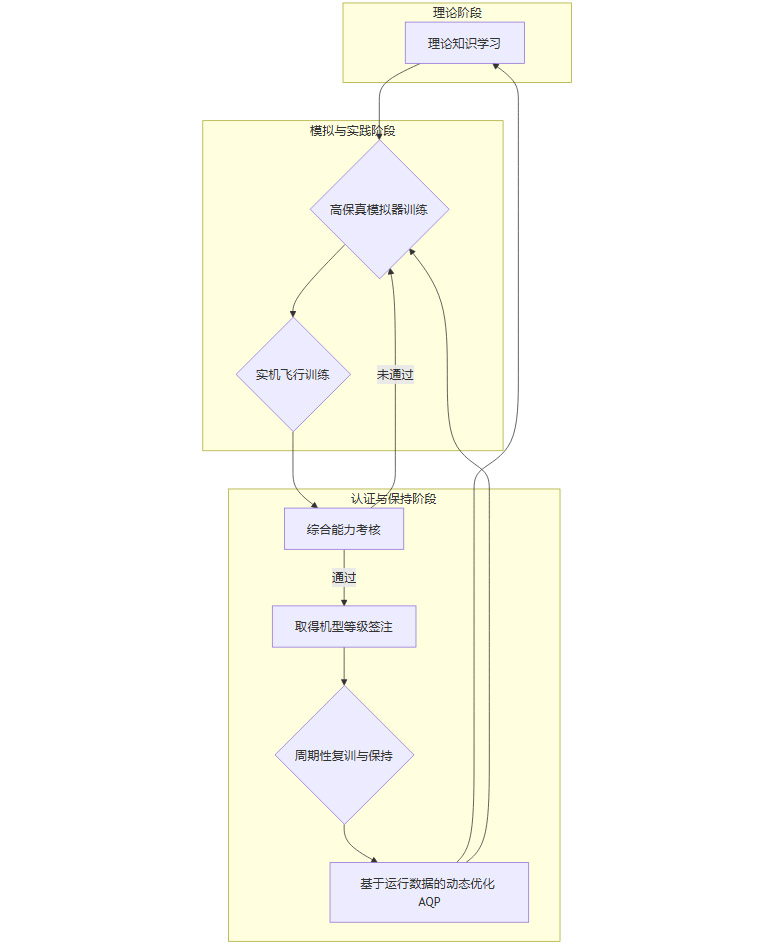
这个架构强调了几个关键点。模拟器训练是核心枢纽,它连接了理论与实践。考核是能力的“试金石”。而**基于数据的持续优化(如先进资格计划AQP)**则让整个体系具备了自我迭代和进化的能力。
3.2 理论知识模块:构建底层认知框架
理论学习是构建飞行员心智模型的基础。它必须紧密围绕eVTOL的特性来设计,摒弃传统航空中不相关的内容,同时增加大量新知识。
3.3 高保真模拟器训练:安全边界内的风险演练
飞行模拟器是eVTOL飞行员训练的灵魂。它可以在零风险、低成本的条件下,让学员反复练习那些在真实飞行中几乎不可能或极度危险的科目。
3.3.1 模拟器技术要求与分级
eVTOL模拟器必须具备极高的保真度,尤其是在飞行模型、视景系统和操控设备上。
飞行模型:必须精确复现垂直、过渡、水平飞行的全部气动和飞控特性,数据来源应是制造商的工程仿真模型或试飞数据。
视景系统:需要高分辨率地还原城市三维环境,包括建筑、桥梁、电线等障碍物,以及各种天气和光照条件。
操控设备:驾驶杆、油门(或功率杆)的力反馈特性需要与真实飞机高度一致。
根据训练目标的不同,可以设置不同等级的模拟器,从简单的桌面级程序训练器(用于熟悉流程)到最高等级的全动飞行模拟器(FFS,用于综合能力训练和考核)。
3.3.2 关键训练科目设计
模拟器训练应采用情景驱动的方式,而不是孤立的动作练习。通过构建一系列真实的运行场景(Scenario-based Training),将多个知识点和技能点串联起来进行综合训练。
关键训练科目列表:
标准操作流程(SOP):从上电、自检到关机的全流程演练。
飞行模式转换:在不同重量、高度、速度和风况下,反复练习垂直/水平模式的平稳转换。
能量与备份策略:模拟电池电量异常消耗、单块电池包失效等场景,训练飞行员的航程规划和备降决策。
系统失效应对:
多电机失效:模拟单个、多个、相邻或对角电机失效,让飞行员体验不同失效模式下的飞机姿态和性能变化。
传感器/控制通道降级:模拟GPS信号丢失、大气数据探头结冰、某个舵面或旋翼控制失效等情况。
数据链中断:与运控中心通信中断后的自主决策与应急飞行。
紧急操控与决策:使用**基于任务的训练(LOFT)**方法,模拟一次完整的城市飞行任务,并在其中随机插入多个故障和特情,综合考察飞行员的态势感知、问题解决和决策能力。
3.4 实机飞行训练:真实环境下的能力验证
在完成扎实的模拟器训练后,学员才能进入实机飞行阶段。这一阶段的重点不再是初级技能的培养,而是将模拟器中习得的能力在真实环境中进行验证和巩固。
训练内容包括:
本场飞行:在机场或专用起降场内,进行起降、悬停、近地机动等基础科目,感受真实飞机的响应和环境因素(如风、地面效应)的影响。
转场飞行:在真实的城市低空航线上,执行跨区域飞行任务,重点训练与空管/运控的协同、航路点跟踪、障碍物规避以及在真实起降场的起降程序。
运控协同:与地面调度/运控中心进行数据链通信、飞行计划动态调整、应急信息传递等全流程协同训练。
3.5 考核与持续优化:数据驱动的先进资格计划(AQP)
训练的终点是严格的考核。考核应分为理论考试、模拟器技能考试和实机综合考核三部分,全面评估学员是否达到预设的能力标准。
更进一步,行业应积极引入先进资格计划(Advanced Qualification Program, AQP)。AQP是一种数据驱动的训练质量管理体系。它通过持续收集和分析真实运行数据、模拟器训练数据和考核数据,来动态评估训练大纲的有效性,并据此进行调整和优化。例如,如果数据显示某一类故障在实际运行中频繁发生,或者飞行员在模拟器中对某一科目的掌握普遍不佳,AQP系统就会建议增加该科目的训练比重或改进教学方法。这使得训练体系能够紧跟技术发展和运行实践,实现持续的自我完善。
📜 四、法规与认证体系:三方协同的闭环治理
%20拷贝-jwcg.jpg)
一套先进的训练体系,如果脱离了法规的框架和权威的认证,就如同在沙滩上建造楼阁,无法真正落地。为eVTOL飞行员颁发“天空驾照”的过程,本质上是一场涉及监管机构、产业界(制造商)和运营端(航司、培训机构)的三方协同治理。
4.1 顶层设计:监管机构的角色与路径
监管机构是整个认证体系的“立法者”和“守门人”。其核心任务是制定一套既能保障安全、又能适应技术快速迭代的规则框架。
4.1.1 国际对标与国内探索
全球范围内的航空监管机构都在行动。美国联邦航空管理局(FAA)已经开始为“空中出租车”的商业运营制定专门的飞行员培训和认证规则。这些先行探索为全球提供了重要的参考模板。
在国内,政策环境也在快速成熟。低空空域的分类划设、无人驾驶航空器运行规则的发布、以及eVTOL起降场标准的制定,共同为飞行员的训练、运行和认证铺设了基础政策轨道。监管的思路正从传统的“一刀切”式管理,向更精细化、场景化的方向演进。
4.1.2 从“指令性”到“性能化”的转变
面对eVTOL这种技术新物种,传统的指令性法规(即规定必须“做什么”)可能显得僵化。未来的监管趋势是更多地采用基于性能的法规(Performance-Based Regulation, PBR)。
这意味着监管机构不再详细规定训练的每一个具体动作或时长,而是提出明确的安全目标和能力要求。例如,法规可能要求“飞行员必须有能力在模拟的城市峡谷风环境中,于单电机失效的情况下安全降落”,但具体如何通过训练达成这一目标,则给予制造商和培训机构更大的灵活性。这种方法鼓励技术创新,同时守住安全的底线。
4.2 产业协同:制造商与运营商的责任
安全链条的构建,离不开产业链上各个环节的紧密配合。
4.2.1 制造商:从设备供应商到生态共建者
制造商是eVTOL技术的源头,其角色必须超越单纯的飞机销售。它们是飞行员训练体系中不可或缺的技术赋能者。
数据开放:制造商必须提供详尽的飞行性能数据、工程仿真模型以及关键的失效模式与影响分析(FMEA)数据。这些是开发高保真模拟器和设计应急训练科目的基础。
深度参与:制造商应深度参与训练大纲的编写和模拟器的开发、验证过程。只有他们最清楚自家飞机的设计哲学、性能边界和潜在风险。
一体化平台:鼓励制造商建设“研发-试飞-训练”一体化平台。例如,国内的沃飞长空联合中国民用航空飞行学院,共同启动行业级的eVTOL试飞员培训。这种模式将最新的试飞经验和工程数据,最快地转化为训练内容,形成高效的知识传递闭环。
4.2.2 运营商与培训机构:一线实践的反馈者
运营商和培训机构是训练体系的最终执行者和效果检验者。
实践反馈:他们在日常训练和模拟运行中,会发现理论设计与实际操作之间的差距。这些宝贵的实践经验,必须通过一个有效的反馈机制,回流到监管机构和制造商,用于迭代优化训练大纲和法规标准。
联合评估:在飞行员的资格认证过程中,应引入由监管方、制造商、运营商代表共同组成的评估小组,进行综合能力评估。这种跨主体的联合评估模式,能更全面、客观地衡量飞行员的真实水平。
4.3 认证流程:能力与型号的同步校验
飞行员的认证流程必须与飞机的适航取证过程紧密耦合,实现“飞机性能”与“飞行员能力”的同步发展和匹配校验。
4.3.1 并行工程的思路
传统的模式是飞机先取得型号合格证(TC),然后再开发相应的训练大纲。这种串行模式对于快速迭代的eVTOL行业来说过于缓慢。
更高效的方式是采用并行工程的思路。在飞机进行TC适航审定的同时,其配套的飞行员训练大纲和模拟器也应同步进行开发和评审。
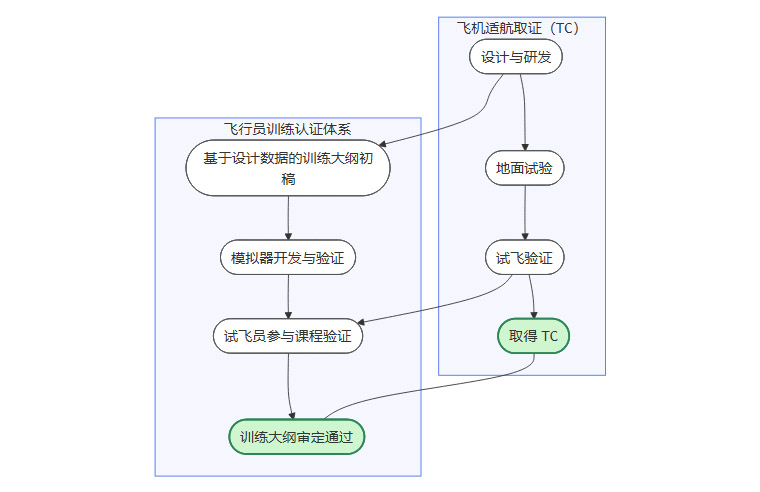
如上图所示,两个流程相互关联,并行推进。飞机的试飞数据可以直接用于验证和优化训练课程,确保当飞机正式交付时,一套成熟、合规的飞行员培养方案也已准备就绪。
4.3.2 精细化的能力签注
未来的eVTOL飞行员“驾照”,可能不是一个笼统的“eVTOL等级”,而是包含更精细化的能力签注。
构型签注:针对不同技术路径的机型,如多旋翼构型、倾转翼构型、复合翼构型,设立不同的构型签注。持有A构型签注的飞行员,若要飞B构型飞机,需完成相应的差异化训练。
自动化功能签注:针对不同自动化等级的飞机,设立功能签注。例如,飞行员可能需要获得“全自动起降功能”或“高级应急管理系统”的专项签注,才能在相应机型上执行特定任务。
这种模块化、精细化的认证方式,能够更精准地匹配飞行员能力与飞机性能,提升整个系统的安全性。
结论
eVTOL飞行员的训练与认证,远非一次简单的执照转换或课程升级。它是一项系统性工程,是整个低空经济安全基石的核心组成部分。破解“飞行员之困”的路径已经清晰,即放弃孤立的、线性的传统模式,转向一个由监管、产业和运营三方协同驱动的、数据闭环的、能力本位的全新体系。
这个体系以高保真模拟器为技术核心,以能力本位(CBTA)为教学理念,以先进资格计划(AQP)为持续优化工具,并最终落脚于一套与飞机技术发展同步的、精细化的法规认证框架。唯有如此,我们才能在2025年商业化窗口期到来之时,为这片崭新的天空,准备好足够多、足够合格的“驾驶员”,让城市空中交通的愿景安全、有序地照进现实。
📢💻 【省心锐评】
eVTOL的瓶颈不在天上,而在驾驶舱和训练场。破解飞行员培养难题,是低空经济从蓝图走向现实的唯一通行证。

评论